産業用水中ドローン「DiveUnit300」を開発・提供するFullDepth(フルデプス)は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の2022年度「研究開発型スタートアップ支援事業/Product Commercialization Alliance(PCA)」の成果として、「DiveUnit300」の自動航行による高精細な海底マッピングを実現したことを発表し、2023年6月21日に成果報告会と屋内プールでのデモンストレーションを開催した。
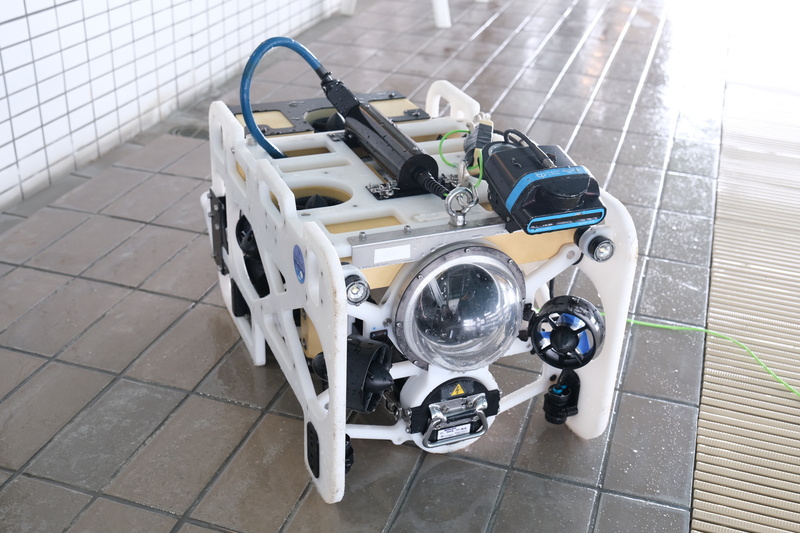
「DiveUnit300」は、ROV(Remotely Operated Vehicle)と呼ばれる遠隔操作型の水中ドローン。今回の取り組みでは、機体のIMU(慣性計測装置)とDVL(対地速度計)のセンサーフュージョンによって、「自己位置推定」と「自動制御」という2つの機能を開発した。


実証では、比較的透明な海域の水深約4~5m、範囲約295m²において、海底高度1.5mの距離を保ったまま、水中ドローンの自動航行を約10分30秒間実施し、動画をリアルタイムに確認しながら撮影した。
その後、取得した動画データから1秒間隔で635枚の画像を切り出し、フォトグラメトリ処理を行って、海底のオルソ画像を作成した。
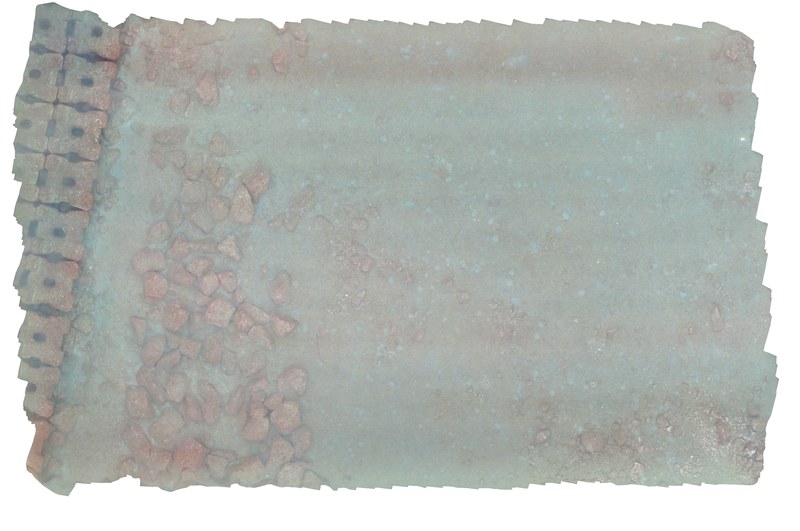
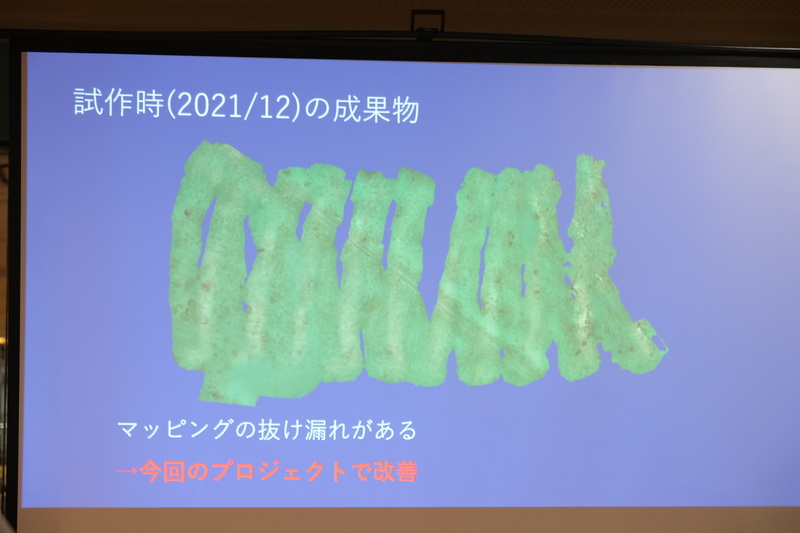
ちなみに、同社ではこの技術を数年前から開発してきたという。約2年前に完成した試作では、マッピングに抜け漏れがあったが、今回は「抜け漏れのない」高精細な海底マッピングを作成することに成功し、技術の改善を実証できた。
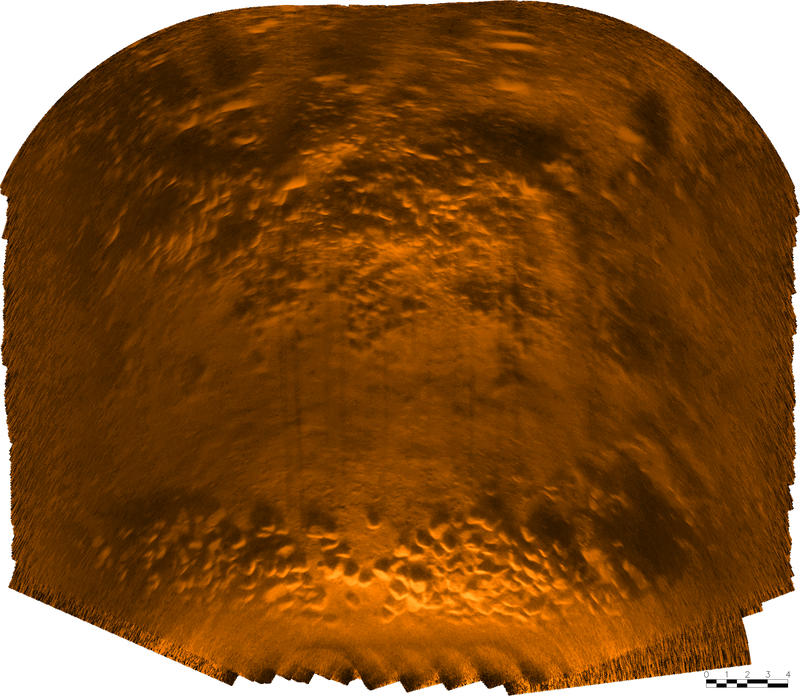
同時に、同技術を用いてマルチビームソナーによる検証実験も実施。オルソ画像作成時と同じ海域において、水中ドローンが海底高度2.0mを自動航行して、音響画像による海底マッピングに成功した。
さらに、両成果物において、潜航開始時のGPS情報をもとに、水中での位置情報データを紐づけることも可能だ。「DiveUnit300」のような手持ちで運べて船からも下ろせる比較的小型のROVで、このような成果物を得られるようになったのは画期的だという。
吉賀社長、「水中DXの第一歩」
成果報告会では、最初にFullDepth(フルデプス)代表取締役社長の吉賀智司氏が、同技術を開発するに至った背景を説明した。
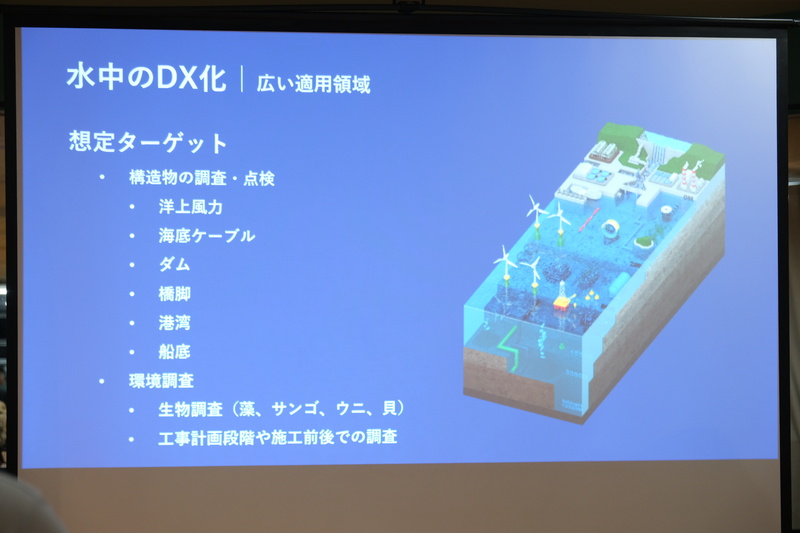
これまで同社の顧客からは、「水中の情報を定量的かつ高精度に取得したい」という要望が寄せられてきたという。例えば、「水中インフラの調査・点検をしたい」「災害救助や捜索を行いたい」「海底の生物や地質を調査し、環境情報の可視化や定量化を図りたい」などだ。
さまざまな領域から同様の要望があることに着目すると、従来の「潜水士が水中に潜って情報を取得する」という方法に、いくつかの課題があることが分かったという。
1つめは、ベテランの潜水士になればなるほど、非常に優れた水中の点検作業者である一方で、個人の勘やスキルに依存するところが大きいことだ。また、職業として潜水業務に携わる人は高齢化が進み、いまや依頼したくても担い手が足りないことが、現場では発生しているという。
2つめは、撮影したデータの位置を特定できないことが挙げられる。これは、潜水士の代替として遠隔操作型の水中ドローンを活用した場合でも同じ課題が立ちはだかるが、水中では電波が著しく減衰するため、GPSなどの位置情報を取得できない。このため、調査、点検、捜索などのいずれの用途においても、位置情報がなければデータ活用は推進できないと指摘されてきた。
3つめは、一度に広範囲のデータを取得したいが、潜水時間に限りがある人間にとっては負荷と危険が隣り合わせになるという点だ。調査や点検の対象となる水中構造物は非常に大きい。また、捜索や環境調査の対象エリアも広範に及ぶことが多い。しかし、暗く濁った水中でもしっかり撮影するには対象物に近接する必要があるため、全体像が見えづらくなる、抜け漏れなく全体を網羅できたのかを把握しにくくなるという難点があった。
「従来の課題を解決しようと思うと、位置情報を伴いながら、対象物の全体像を効率よく把握できる技術が求められてくると考えた」(吉賀社長)

こうした課題に対して、今回新たに開発した技術がもたらす利点は多い。まず、自動航行できるということは、水中データ取得の再現性を高めることができる。さらに位置情報を伴った状態で水中でのミッションを再現できるからこそ、過去データとの比較も可能になる。
また、広範囲な海域の水中データ取得を、自動航行によって人間の手を介さずに実現できれば、人間が長時間拘束される必要がなくなり、利用コストの低減を見込める上に、人間の可処分時間が増加する。
「人間の作業時間を生み出すということは、水中に関わらずロボットに一番求められることだ。水中ドローンの自己位置を推定する技術、水中ドローンが自動航行する技術、双方が組み合わさって初めて、水中DXを実現できるのではないだろうか」(吉賀社長)
抜け漏れないマッピングを実現した「2つの技術」
今回の実証で示した「水中ドローンの自動航行による海底マッピング」は、1つめに「自動航行によるデータ取得」、2つめに「合成処理」、3つめに「海底マップ作成」という、3ステップを経て行われる。
現地で行ったのは、1つめの「自動航行によるデータ取得」のみ。動画データを撮影するのと同時に、水中ドローンの位置情報と、そのときの時刻情報を取得して、2つめ以降の作業はデータを持ち帰って実施したという。
技術概要について説明した堀本氏は、「以前の取り組みでは、マッピングの抜け漏れがあったが、今回のNEDOのプロジェクトでは、これを技術的に改善できた」と成果を説明した。
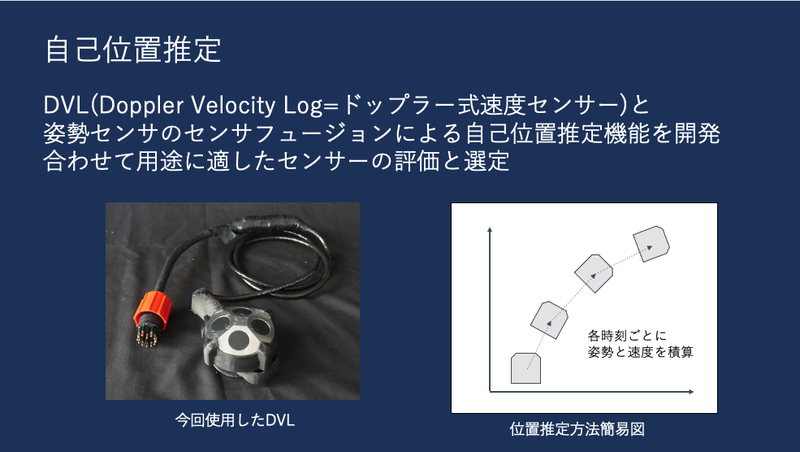
具体的には、2つの機能を開発およびブラッシュアップしたという。1つは「自己位置推定機能」だ。
これは、DVLと呼ばれるドップラー式速度センサーと、IMUと呼ばれる姿勢センサーのセンサーフュージョンによって自己位置を推定する機能だ。何時何分に機体がどちらに向かってどれくらいのスピードで動いているのかを積算することで、位置座標の推定を行った。今回の用途に合わせて、適したセンサーを選定して用いたという。
「ロボットが自動で動くためには、まずは自分の位置が分からないと、どちらに動けばいいのかを判断できない。自動航行に一番必要なのが、自己位置推定機能になる。また位置が分からなければ、取得したデータもどこの何かが分からないので、データを活用するためにも必須の機能だと思う」(堀本氏)
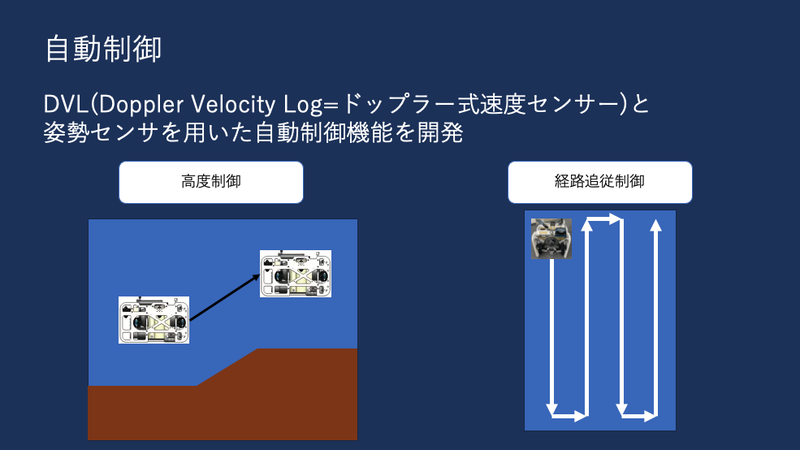
もう1つは「自動制御機能」だ。前述のセンサーと同じものを用いて、「高度制御機能」と「経路追従制御機能」という、海底マッピングに必要な2つの機能を実装したという。
海底マッピングでは、機体から下向きにカメラを取り付けて、海底からの距離を一定に保ったまま航行する必要があるため、高度制御機能が不可欠だ。そして、一定範囲内を自動的に抜け漏れなく撮影するためには、予め定めた目標点を水中ドローンが次々と追従する、経路追従制御機能が必要になる。
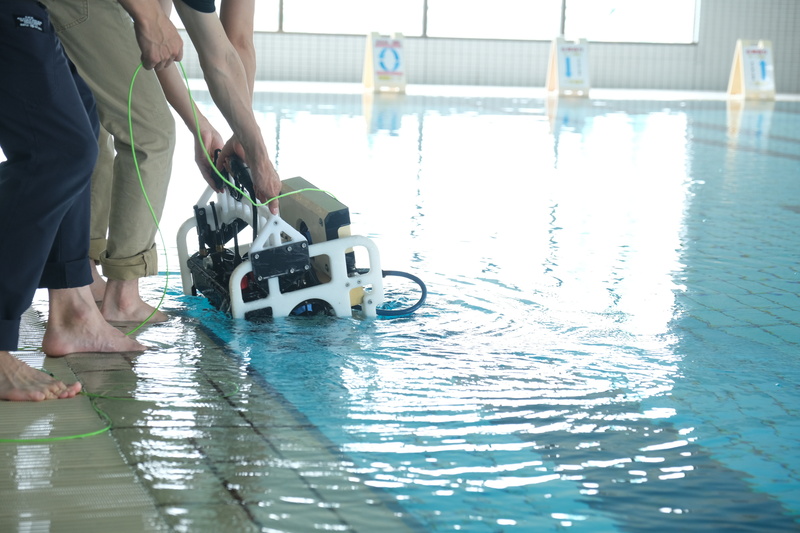
屋内プールでデモンストレーション実施
屋内プールにおけるデモンストレーションでは、アプリケーション上のスタートボタンを押すと水中ドローンが自動で航行を開始した。縦方向に10m前進し、真横に0.3m移動してから、また縦方向に10m後進する、これを3往復するという自動航行ミッションを披露した。
現段階で、技術的にはほぼ完成したとのことで、今後はアプリケーション開発も進めて製品化を目指すという。オルソ画像の精度向上を図るため、静止画自動撮影機能の開発も検討中で、水中カメラやフォトグラメトリのソフトウェアの選定もしばらくは続けるとしている。画像鮮明化処理機能も、これから本格的に追加を目指す。補足だが、リアルタイム映像確認のニーズが高いことから、機体の無線化については検討していないとのことだ。
同技術の活用を見込む「3つの領域」
では、同技術はどのような領域で活用が見込まれるのだろうか。吉賀社長は、具体的に3つの領域を挙げて、今後も社会課題の解決に資するサービスの開発や提供を目指すと意欲を示した。
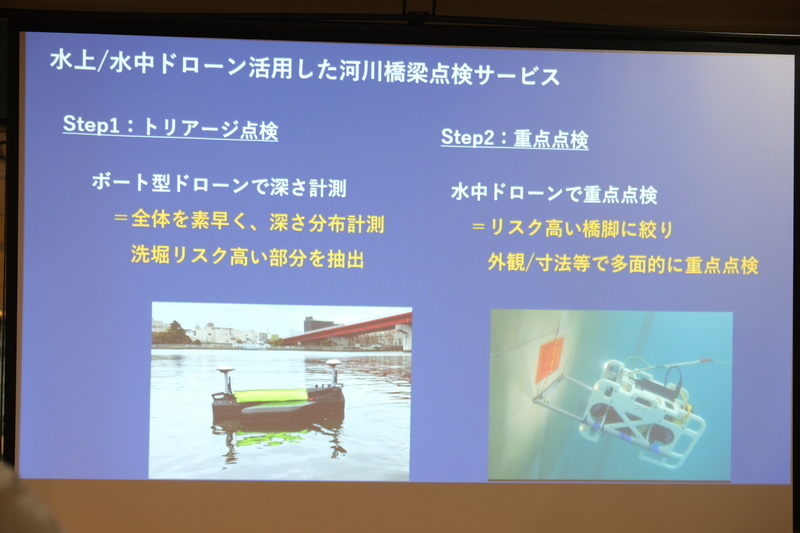
「鉄道橋脚点検」では、「JR東日本スタートアッププログラム2022秋」に採択されたボート型の水上ドローンと水中ドローンを組み合わせた河川橋梁点検手法を紹介した。鉄道橋脚点検サービスの開発や外販、空中ドローンを用いた点検結果との連携なども視野に入れていると発表した。
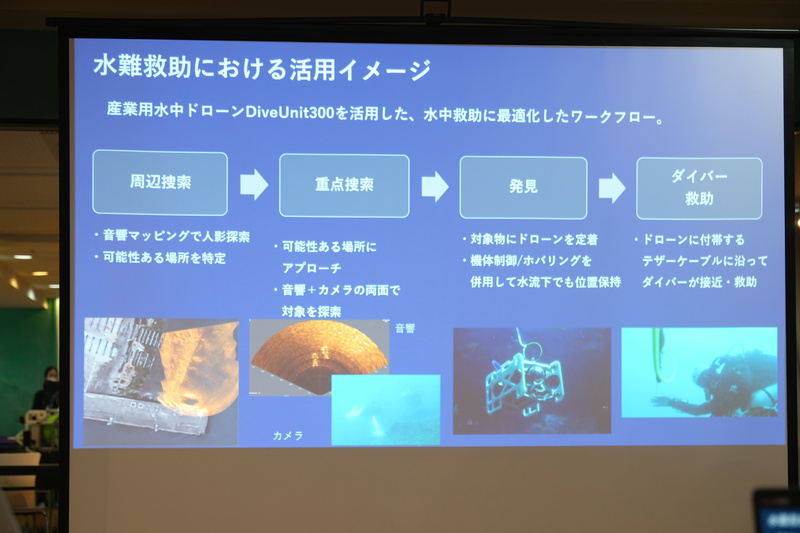
「水難救助」では、水中ドローンを活用したワークフローを定義したうえで、消防や警察などへの提供を強化すると表明した。「藁にもすがる思いでという枕言葉づきで、水中の捜索をお手伝いしたことがある」という吉賀氏。外洋はもとより、湖沼、河川、沿岸部での救助活動を効率的に行う必要性が、社会的にも高まっているのではないかと見解を示した。
「ブルーエコノミー」では、海洋におけるCO2吸収源とされる海草や海藻をブルーリソース(海洋資源)として有効利用することでカーボンニュートラルを目指すために、水中をセンシングする技術、水中ロボットを制御する技術を総合的に提供していく。
「当社は、水中ドローンというハードウェアを開発するだけではなく、機器を制御する技術、センシングの技術なども、しっかりと蓄積してきた。今後はさらに、過去データとの比較や異常検出などのアプリケーションと組み合わせて提供していくことで、水中DXを実現していきたい。これだけ広い領域にまたがって水中におけるテクノロジーを保有している会社は、世界的にも稀な存在。社会課題の解決に向けてお役に立てるよう、よりいっそう頑張っていきたい」(吉賀氏)
藤川理絵の水中ドローン最前線
vol.1「水中ドローン」とは
2021年版 水中ドローンの役割、効果、市場規模、課題と今後の展望まとめ
vol.2 海洋ビジネスと水中ドローン
海洋研究開発機構(JAMSTEC)吉田弘氏が語る「水中ドローンの課題と展望」
vol.3 福島ロボットテストフィールドの活用
一般社団法人日本水中ドローン協会、多様な機体で研修実施
vol.4 水中ドローンニュースまとめ(2021年1月~3月)
海中旅行、CHASING新機種、ロボテスEXPO、牡蠣養殖場での実証や海洋DXの取り組み
vol.5 「陸側」での水中点検事例
管渠、ダム、浄水場など、ジュンテクノサービスNETIS登録の狙い
vol.6 東京久栄の事例
水中ドローン活用30年、管路・水路・ダム・漁礁での使い分けとは
vol.7 スクール潜入レポート
水中ドローン安全潜航操縦士講習とは? 座学・実技から使用機体まで解説
vol.8 海の次世代モビリティ
国交省「海における次世代モビリティに関する産学官協議会」とりまとめを発表
vol.9 養殖業での事例
網の汚損点検、アンカーの捜索、死魚回収まで、活用法の模索が進む
vol.10 日本ROV協会が本格始動
一般社団法人日本ROV協会の事業概要、技能認定講習、今後の展開とは
vol.11 DiveUnit300の新機能
フルデプス、ホバリングなどのオプションと各種アタッチメントを発表
vol.12 広和ROVやBoxfishの操縦体験も
「海のアバターの社会実装を進める会」福島RTFで2日間開催
vol.13 NTTドコモの事例
ICTブイ、5Gやクラウドとの連携を見据えた、「養殖DX」におけるROVの活用
vol.14 - 1 海のモビリティを“誰でも使える”ものに
(前編)国交省「海の次世代モビリティの利活用に関する実証実験」最終成果報告会
vol.14 – 2 技術とニーズ「マッチング」の行方
(後編)国交省「海の次世代モビリティの利活用に関する実証実験」最終成果報告会
vol.15 FIFISHシリーズ徹底比較
AI画像認識で水中ホバリングする新機能「Vision Lock」と各機種の比較をレポート
vol.16 水上水中ドローンの最新機種
SUBSEA TECH JAPAN 2022(第4回海洋産業技術展)展示機体と講演を取材
水中ドローンビジネス調査報告書2022
執筆者:藤川理絵、インプレス総合研究所(著)
発行所:株式会社インプレス
判型:A4
ページ数:292P
発行日:2022/7/7
https://research.impress.co.jp/rov2022