通称「RTF」と呼ばれる福島ロボットテストフィールドには、水中・水上ロボットエリアがある。ロボットによる水中のインフラ点検と災害対応の実証実験を行える施設だというが、実際にはどのようなことができるのだろうか。今回は、一般社団法人日本水中ドローン協会が認定スクール(水中ドローンインストラクター)を対象に開催した、スキルアップ研修に同行し、屋内水槽試験棟の活用についてまとめた。
福島ロボットテストフィールドとは
福島ロボットテストフィールド(RTF)は、陸・海・空のフィールドロボットの一大開発実証拠点だ。東日本大震災や原子力災害によって失われた地域の産業を回復するため、新たな産業基盤の構築を目指す国家プロジェクト「福島イノベーションコースト構想」に基づいて整備され、2020年3月31日に全面開所した。
「無人航空機エリア」「インフラ点検・災害対応エリア」「水中・水上ロボットエリア」「開発基盤エリア」が設けられ、「水中・水上ロボットエリア」には2つの施設がある。水害で冠水した市街地を再現した「水没市街地フィールド」と、30m×12m×水深7mの大水槽がある「屋内水槽試験棟」だ。
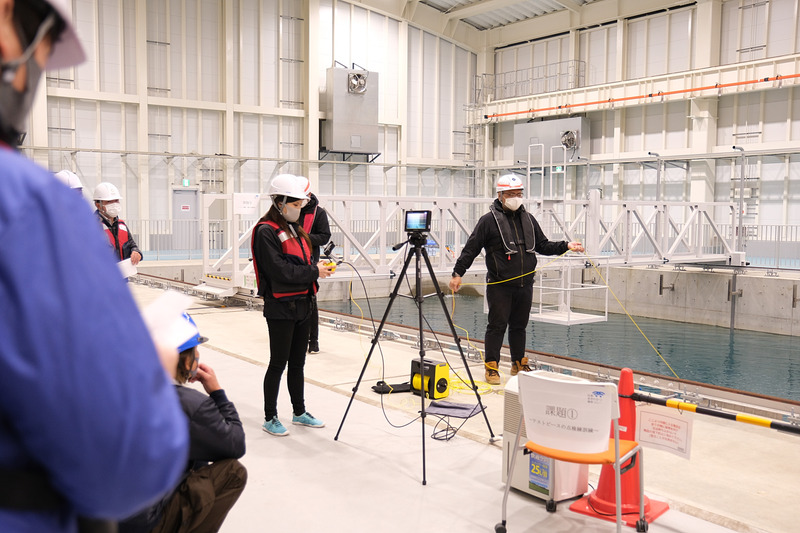
今回、研修が実施されたのは、「屋内水槽試験棟」。大水槽は広いだけではなく、クラック(ひび割れ)や錆があるテストピース、水槽内に流れをおこす水流装置、現場に見立てた橋もかけられており、さまざまな機体性能テストや練習が可能な施設となっていた。施設利用時は、ヘルメットとライフセーバーの着用が義務付けられた。

さまざまな機体を用いた研修
一般社団法人日本水中ドローン協会は3月11日、この大水槽を活用して、認定スクール(水中ドローンインストラクター)を対象にスキルアップ研修を実施した。神奈川、京都、徳島など全国から5校と、賛助法人となる東京久栄などから、集まったのは総勢20名。
やはり注目を集めたのは、新発売の「CHASING M2 PRO」だ。M2と比べて、モーター出力が向上したが、実際にはどの程度か。水流装置を活用して性能テストが行われ、M2 PROのほうが水流に耐えてホバリング(定位置保持)する能力が高いことが示された。ロボットアームを使用した訓練も盛り上がった。


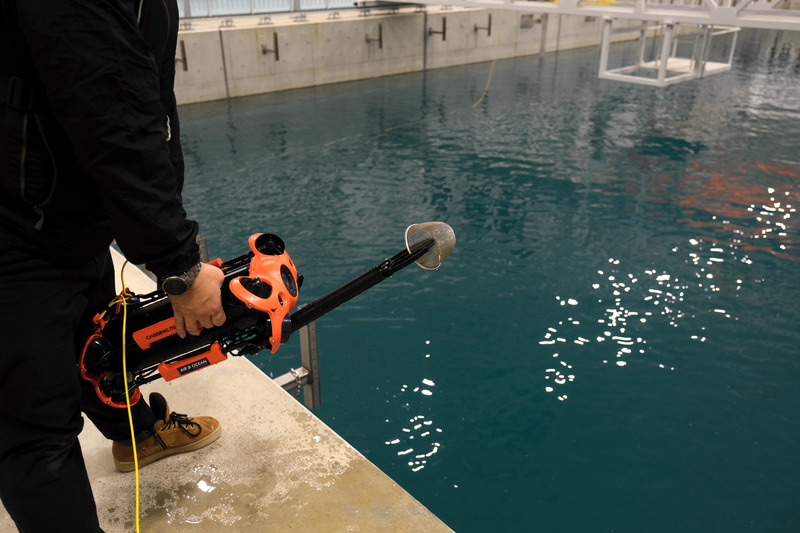
研修では、協会が準備した機体のほか、参加者が普段の業務で使用している機体も持ち込まれ、「FIFISH V6S」の使用も目立った。また、東京久栄が新たに導入したという、国産水中ドローンメーカーFullDepthの「DiveUnit 300」は、多くの参加者の興味を惹きつけていた。


4つの課題を3時間で集中訓練
当日の課題は4つ。参加者を4チームに分け、約3時間で全チームが全ての課題をクリアすることを目指した。このなかで、水流装置のオン・オフを繰り返し、さまざまな環境における機体性能評価と操縦訓練を行なった。
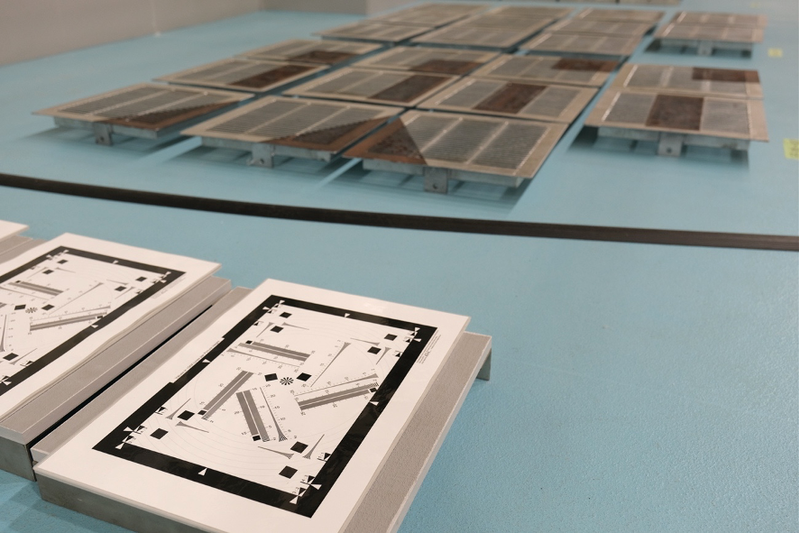
① テストピースの点検練習
② 水中構造物の探索・撮影訓練
③ ロボットアームやレーザースケーラーの使用訓練
④ 未経験機種の体験
課題①は、テストピースの点検練習だ。水深約2mのところに8種類のテストピースを横並びで吊るして、機体を横移動させながら各種ピースを点検する。水流装置のオンオフや、照明の有無などを試しながら、操縦と撮影の訓練を行なった。


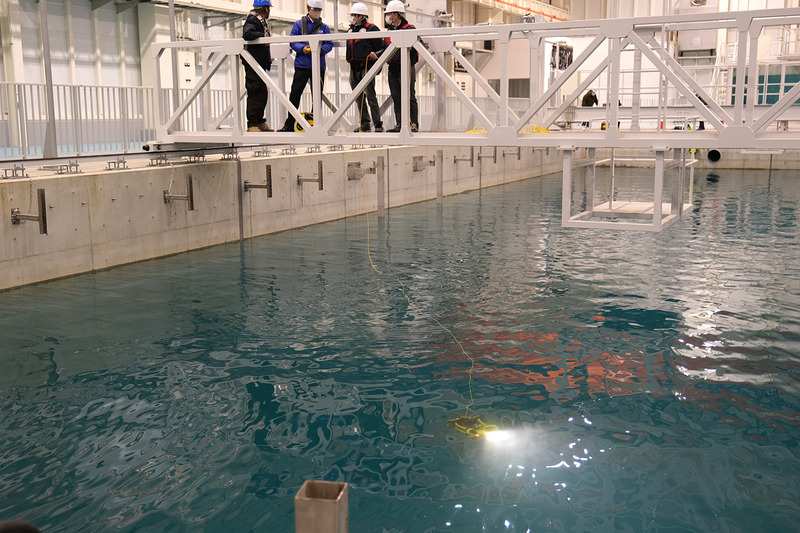
課題②は、水中構造物の探索と撮影訓練だ。大水槽の底部に設置された、三角錐や立方体の構造物の周囲で、操縦や撮影を行なった。三角錐の内部には、機体がギリギリ通れる隙間があり、狭所潜航の操縦訓練を行う姿も目立った。対象物の周りをぐるぐる動き回る際は、ケーブルの絡まりには配慮が必要だが、テザー(ケーブル)さばきの練習にもなったようだ。

課題③は、ロボットアームを使用した訓練だ。CHASING M2 PROに実装予定のレーザースケーラーの使用感の把握や、CHASING M2 PROにアームを装着した遺失物回収訓練が行われた。アームの使用では、まずは陸上で開閉操作を確認。コントローラー右上のボタンの長押しすると、アームが開いた。ここでは2つの訓練を行なった。

まず最初に、アームを使って直接対象物を捕捉する訓練だ。当日は、味噌こしなどを水中に沈めて、回収を試みた。そして次に、紐をつけたカラビナをアームで持って対象物のところまで潜り、カラビナを対象物に引っ掛ける訓練を行なった。重量が大きいものは、アームで直接引っ張ると損傷リスクもあるが、カラビナに紐をつけておいてそれを持ち上げれば、アームやテザーの損傷リスクを回避できる。




課題④は、未経験機種の体験やフリーでの撮影。水槽内にはさまざまな機体が潜航した。複数機体を同時運用する際の、接続時の声かけ、ケーブルの絡まり注意といった訓練も行われた。
筆者もこのタイミングで操縦を体験。CHASING M2でFullDepthのDiveUnit 300を追従してみた。DiveUnit 300が比較的ゆっくり動く機体であるためか、初心者でも容易に追従でき、まるで水中を泳ぎながら海亀を追いかけているようでとても楽しかった。ただ、この大水槽の、濁度のさほど高くない水中でさえ、水深わずか数mで機体の目視は困難になり、機体から伝送されるカメラ映像だけを頼りに操縦するのは、水中構造物や他の機体などと衝突したり、テザーが絡まるのではないかという怖さもあった。
水中でのヒヤリハットや業務上知り得たナレッジなどを、インストラクター同士で話し合える、また未経験機種の体験もできるこのような場は、これから水中ドローンビジネスを始めようとスクール受講をする方々にとっても、非常に有益であると感じられた。
東京久栄が試験運用のために持ち込んだFullDepthの「DiveUnit 300」は、他の機種と比べて一回り大きく、なんとか持ち運びできるほど重量もあり、装備なども全く異なり注目の的となっていた。マルチビームソナーを取り付ける様子や、水中でデータを取得する様子も、同社の実演により参加者みんなで見ることができた。

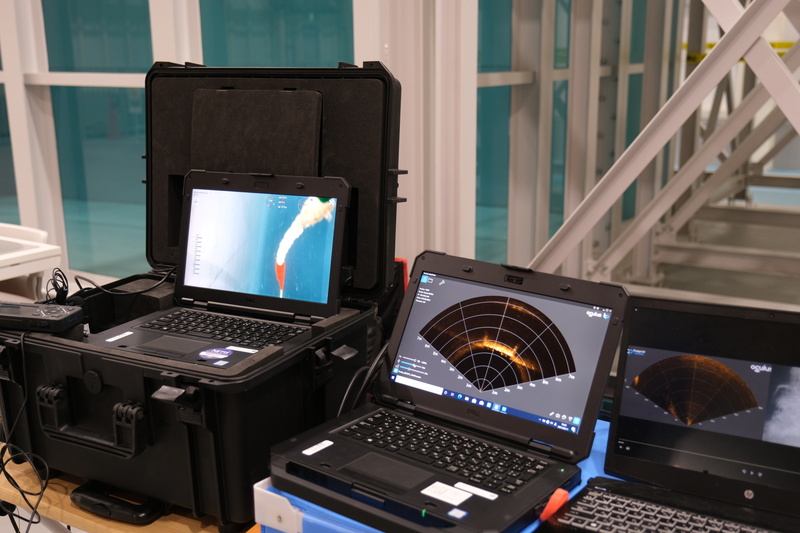
このように、福島ロボットテストフィールドで行われた本研修では、「水流装置にどこまで近づくと、どの機体がどれくらい流されるのか」などの性能比較も、多様な機体を用いて行われたので、大変興味深かった。この「水中・水上ロボットエリア」には、もう1つの施設「水没市街地フィールド」もある。こちらの活用についても、いずれレポートしたいと思う。


【藤川理絵の水中ドローン最前線】 vol.1「水中ドローン」とは
-2021年版 水中ドローンの役割、効果、市場規模、課題と今後の展望まとめ-
https://drone-journal.impress.co.jp/docs/special/1183422.html
【藤川理絵の水中ドローン最前線】vol.2 海洋ビジネスと水中ドローン
-海洋研究開発機構(JAMSTEC)吉田弘氏が語る「水中ドローンの課題と展望」-
https://drone-journal.impress.co.jp/docs/special/1183454.html
本特集は、2020年12月にインプレス総合研究所が発行した『水中ドローンビジネス調査報告書2021』にさらに情報を整理し、詳細をまとめています。詳細を知りたい方は以下のページよりご確認ください。無料サンプルPDFのダウンロードも可能です。
水中ドローンビジネス調査報告書2021
執筆者:藤川理絵、インプレス総合研究所(著)
発行所:株式会社インプレス
判型:A4
ページ数:172P
発行日:2020/12/23
https://research.impress.co.jp/rov2021