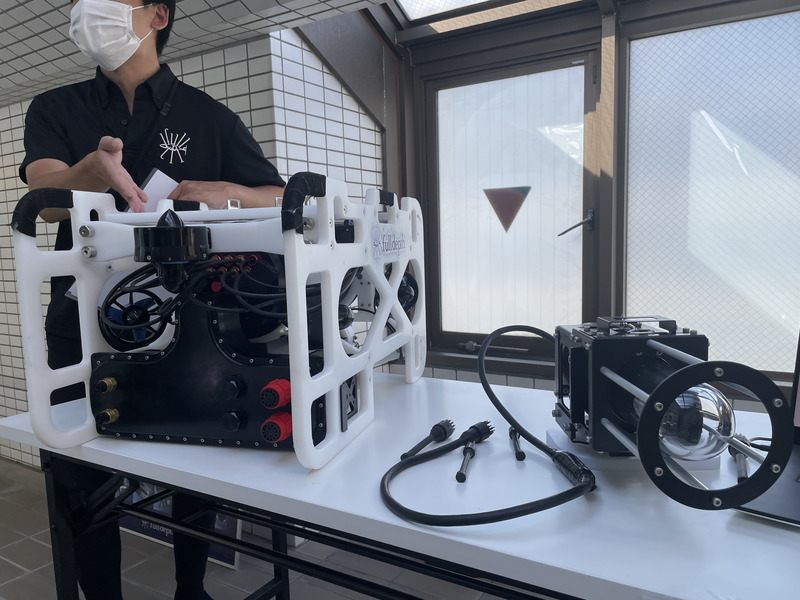
筑波大発のスタートアップで、国産水中ドローンメーカーとして注目を集めるFullDepth(フルデプス)が、2021年10月に独自の展示会を開いて、同社が開発を手がける産業用水中ドローンDiveUnit300(ダイブユニット300)の新機能群をお披露目した。
FullDepthは自社開発の試作機で、世界で初めて水深1000m域まで潜航した実績を持つ。DiveUnit300の大きな特徴は、重量28kgという運用の手軽さだ。船上に専用設備を必要とせず、大人2~3名で持ち運べる一方で、機体をプラットフォームとして各種計測機器を搭載することができる。また、機体や機器を制御する各種ソフトウェアを統合管理し、インターネットにつなげることによって遠隔でリアルタイムモニタリングできるクラウドサービスも併せて提供されている。
2019年に発売後は、主にダムや発電所などインフラ点検や維持管理、水産業での業務改善のために活用されており、今後は洋上風力発電の施設建設に伴う環境調査や施工確認、定期点検にも用途が広がることが見込まれる。このようななか、同社は国産メーカーという立場を生かして、多様な領域で機体を活用する顧客の要望に伴走しながら、DiveUnit300をアップグレードさせるさまざまな機能開発を続けてきたようだ。今回、機体性能を向上させる新機能や、さまざまなアタッチメント群を、一気に発表した。
機体性能を向上する「3つの新機能」
今回発表されたDiveUnit300の新機能とは、「ホバリング」「ボディピッチコントロール」「スラスター出力アップ」の3つ。いずれも、オプションとして提供する。発表会では、DiveUnit300の標準構成にオプション機能を搭載した3種の機体でのデモンストレーションが行われ、参考展示として「自動航行」も技術デモが行われた。
・ホバリング
ホバリングとは、水中において一定の位置で停止する機能。発表会では、プールの中に水流発生装置を設置して簡易的な水流を発生させ、流れのある場所に機体を近づけるデモが行われた。ホバリングなしの状態で近づくと、機体操作をやめた途端に流されるが、ホバリング機能をオンにすると、機体は水流に逆らってその位置に止まっていた。ちなみに、位置をずらそうとしてケーブルを引っ張ると、位置を保持しようと抵抗した。潮流の強い場所でのデータ取得や作業に役立つ。
機体に標準構成として組み込まれたセンサーによる姿勢と深度の計測値と、DVL(Doppler Velocity Log)という水中音響装置を機体に取り付けることによって計測できる「機体のXY方向の移動速度」を組み合わせることで、移動量を高速で計算し、定位置に止まるように制御しているという。

同じくDVLを使った技術が、「自動航行」だ。DVLは移動速度計測のほかにも、4か所から音波を発して地面や壁から跳ね返ってきた反射波を受け取って、それぞれの距離を測定することができる。これらのデータを組み合わせることで、壁に正体したまま距離を一定に保ち、自動で移動することを実現したという。たとえば、ダムや港湾の点検で垂直な壁面を撮影してオルソ画像を作りたいとき、現状では操縦者が壁との距離と正体を維持したまま、少しずつ潜航しながら、ひたすら何メートルも移動し続けていくという、非常に負担が大きいものになっている作業を、自動化できる技術になるという。
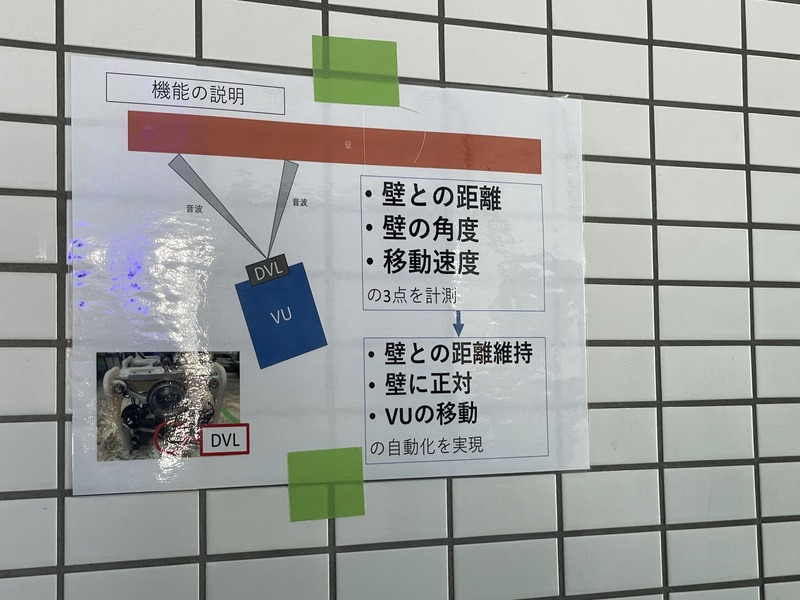
技術デモでは、機体が深度を一定に保ったまま、往復する様子が披露された。今回はあくまで参考展示であり、すぐに製品化されるというわけではないが、港湾での実験では自動での航行と撮影を組み合わせて、壁面点検の自動化を試みているという。機能を追加するにつれて手動操縦の難易度が上がるなか、自動化によって誰もが使いやすいロボットになるよう、さらに開発を進める予定だ。
・ボディピッチコントロール
ボディピッチコントロールは、DiveUnit300に標準構成として備わった7つのスラスターのうち、一番後ろのスラスターを使って、機体前方の向きを上下に傾斜させる機能だ。現状では、カメラチルトは±60°だが、ボディピッチコントロール機能を搭載すると機体を±30°まで傾斜できるため、合わせて±90°となり、天井や橋桁の裏面といった真上や、海底に設置された構造物など真下の撮影が可能になるという。
ボディピッチコントロールによって、マルチビームソナーの稼働範囲拡大、LEDライトの照射角度調整、グリッパーを対象物に当てる角度調整など、さまざまなツールをより使いやすくすることができそうだ。
・スラスター出力アップ
スラスター出力アップは、7つのスラスターの最大出力を約1.2倍にアップするというオプションだ。DiveUnit300の標準構成に専用の電気基盤を追加することで、外観上は何も変わらないが、ワンタッチで出力アップをオン/オフでき、潜航スピードアップも可能となる。
これによって、目的地までの到達時間短縮になるほか、海や川の流れの強い場所でも安定して動けるようになるという。ちなみに構成上、ホバリングとスラスター出力アップは同時には使用できないとのこと。
機体への接続性を向上する「I/F Box」
機体性能向上と並んで、存在感を放っていたのが「I/F Box」。インターフェースボックスの略だ。LANのコネクタ、シリアルのコネクタを2口ずつ備えており、DiveUnit300の標準構成で外部接続が可能な2つのオプションと合わせて、最大で6つのオプションを同時接続できるようになった。
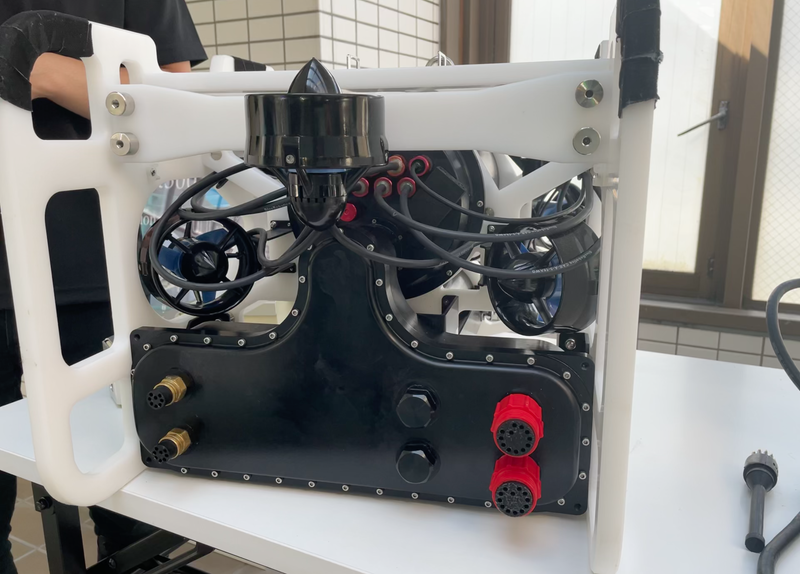
ホバリングや自動航行で必要となるDVLも、I/F Box経由で機体と接続する。すでにリリース済みの360°カメラをはじめ、グリッパー、外付けLED、ラインレーザー、採水機、高圧洗浄機など、鋭意開発中のものも含め、さまざまなオプション機器を機体に接続するためのインターフェースとなる。これに伴って、ホバリングしながらグリッパーで作業する、360°カメラを取り付けたけど光源がない深いところで鮮明な映像を取得するために外付けLEDを追加搭載するなど、現場に合わせてオプションを組み合わせて使うことが可能となる。
そのために重要になるのが、「モジュール化」というオプション製品拡充の方向性。たとえば360°カメラ自体はリコーのTHETA Z1だが、容器の中に設置しアプリケーションを開発して水圧テストを行うのと同時に、I/F Boxに適合する規格のコネクタを用意し、I/F Boxに挿し込むだけで電源取得と通信接続できる仕様にして、オプション機器とケーブル(コネクタ)をセットで製品化する。
・採水機
発表会では、開発中のアタッチメントもたくさん展示されていた。採水機は、アクリルパイプ製の容器部分と、水中モーターでできている駆動部分から構成されており、機体の前面に取り付けて使用する。機体が採水ポイントに到達したら、モーターを駆動してロックを外すことで蓋が閉じ、容器内に水を閉じ込めることができるようになる。蓋面には、エチレンスポンジが貼り付けてあり、気中に上げても中の水が漏れ出ないようになっている。中央のネジを1つ外すだけで、簡単に容器部分を取り外せるという。ただし、一度モーターを駆動した後は気中に持ち上げて再セッティングが必要など、細部を改良中であるためリリース時期は未定とのことだ。
・グリッパー
グリッパーは、アーム部分を3Dプリンタで製造。モーターの開閉速度を遅くして、生物をやさしく捕獲した実績もあり、水族館からの引き合いもあるという。
このほか、ラインレーザーの紹介もあったが、360°カメラとDVL以外の各種アタッチメントは、I/F Box対応中とのことで、DiveUnit300仕様に規格化でき次第、順次リリースしていく予定だ。
・高圧洗浄装置
映像のみの展示だったが、印象的だったのが高圧洗浄装置だ。水を吸い込んで吐き出すときに小さな泡を大量に放出して、泡が弾ける衝撃で付着物を除去する。たとえば鉄製の水中構造物の厚みを測定するさい、常に悩ましいのがフジツボや牡蠣、ゴカイの一種などがこびりついた付着物を、まずは除去するという掃除が潜水作業の大きな負担となっていることだが、将来的にDiveUnit300の自動航行機能と高圧洗浄装置を組み合わせて使用することで、掃除をロボットが担えれば、人間は測定だけに専念することができる。
機械化のニーズは「浅いところにあった」
もともとFullDepthの伊藤CEOは、少年時代から深海とロボットが大好きで、「自分で作ったロボットで深海生物を見る」ことを夢見て歩んできたエンジニアだ。しかし、DiveUnit300の開発を進め、さまざまなフィールドを借りて実証実験を行うなかで、「インフラを維持管理するための点検作業などは、命を賭して担っていただいている人がいるから成り立っていることが分かった」と明かす。

今回の発表会は、「少しでも機械にできることを増やして、潜水作業を担っていただいている人の負担を減らしたい、命の安全に貢献したい」という想いが新たな原動力に加わり、開発された機能や製品がずらりと並べられていると感じた。今後も、「日常使いできる水中アクセス手段を提供する」を掲げるFullDepthが、水深数メートルから深くても100m~200mという「浅い」、けれども生身の人間には潜ることができない水域にあるニーズを掘り起こし、ソリューションを開発、提供し続けていくことで、水中ドローン・水中ロボットの市場が拡大していくことに期待したい。
藤川理絵の水中ドローン最前線
vol.1「水中ドローン」とは
-2021年版 水中ドローンの役割、効果、市場規模、課題と今後の展望まとめ-
vol.2 海洋ビジネスと水中ドローン
-海洋研究開発機構(JAMSTEC)吉田弘氏が語る「水中ドローンの課題と展望」-
vol.3 福島ロボットテストフィールドの活用
-一般社団法人日本水中ドローン協会、多様な機体で研修実施-
vol.4 水中ドローンニュースまとめ(2021年1月~3月)
-海中旅行、CHASING新機種、ロボテスEXPO、牡蠣養殖場での実証や海洋DXの取り組み-
vol.5 「陸側」での水中点検事例
-管渠、ダム、浄水場など、ジュンテクノサービスNETIS登録の狙い-
vol.6 東京久栄の事例
-水中ドローン活用30年、管路・水路・ダム・漁礁での使い分けとは-
vol.7 スクール潜入レポート
-水中ドローン安全潜航操縦士講習とは? 座学・実技から使用機体まで解説-
vol.8 海の次世代モビリティ
-国交省「海における次世代モビリティに関する産学官協議会」とりまとめを発表-
vol.9 養殖業での事例
-網の汚損点検、アンカーの捜索、死魚回収まで、活用法の模索が進む-
vol.10 日本ROV協会が本格始動
- 一般社団法人日本ROV協会の事業概要、技能認定講習、今後の展開とは-
水中ドローンビジネス調査報告書2021
執筆者:藤川理絵、インプレス総合研究所(著)
発行所:株式会社インプレス
判型:A4
ページ数:172P
発行日:2020/12/23
https://research.impress.co.jp/rov2021