水中ドローンと呼ばれる比較的安価なROV(ケーブル経由で遠隔操作する無人潜水機)は、さまざまな方面で産業利活用が始まりつつある。しかし、ビジネスチャンスがどこにあるのか、本当に使えるのか、雲をつかむような話だと感じる方も少なくないようだ。そこで連載第2回は、海洋研究開発機構(以下、JAMSTEC/ジャムステック)研究プラットフォーム運用開発部門・技術開発部 上席研究員の吉田弘氏にインタビューし、水中ドローンの課題と今後の展望について掘り下げた。
吉田氏は、2002年よりJAMSTECに所属し、これまで多くの無人探査機を世に送り出してきた。現在JAMSTECでは、北極氷面下の温暖化調査をミッションとする無人探査機の開発を手がけている。さらに、物理学と電磁気学の理論をバックボーンに、長崎大学の客員教授、アクアLANコンソーシアム幹事、水中無線技術を研究するUWT(Underwater Technologies)研の委員長、日本各地で開催される水中ロボコンの委員など、幅広く活動中だ。本稿では、このように「多様なつながり」を持つ吉田氏だからこその、水中ドローンへの眼差しを共有したい。
世界6位の広い海を「うまく使えていない」
──吉田さんは約20年間、海洋に携わって来られました。日本の海洋ビジネスをどのように見ていらっしゃいますか?
吉田氏 :日本人は、海に憧れを持っていますが、残念ながらうまく海を使うことはできていません。我々日本人が持つ「海への畏敬の念」が邪魔になっているのかもしれません。世界で6番目に広い海を持っているのであれば、自然に配慮しながら、もっと使ったほうがよろしいのでは、ということは大学の講演などでもよく話していますね。
──海を使えていないとは……?
吉田氏 :日本の主たる海洋産業は、海運、造船、漁業養殖の3つしかありません。日本のGDPは約500兆円ですが、3業種を合計しても約10兆円。右肩下がりに落ちている、かつ海の中を使えているのは漁業養殖くらいです。対して、例えばノルウェーなどの漁業先進国と比べると、一人当たりの生産高は10倍ほど違うというのが現状です。
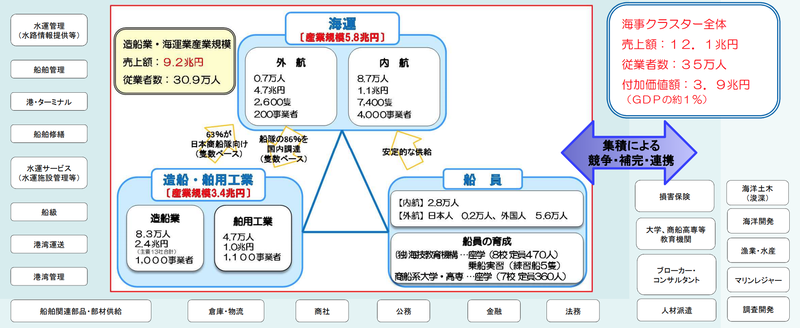
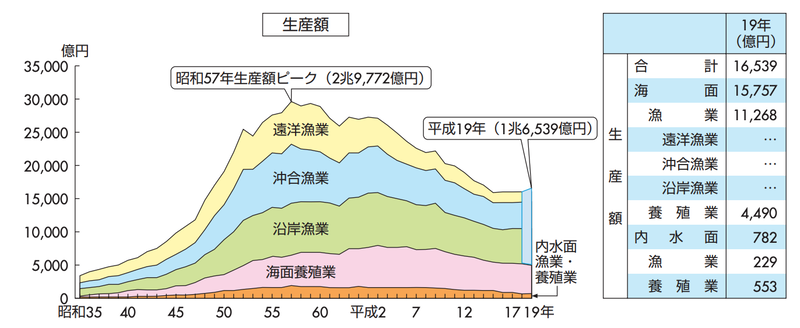
出所:「造船・舶用工業等の現状と施策」(国土交通省)、「我が国水産業をめぐる動向」(水産庁)
海底資源についても、ニュースで話題になってから10年くらい経ちますが、レアアース、メタンハイドレート、熱水鉱床など、莫大な資産価値があって100年分のエネルギーが眠っているとも言われているのに、一向にビジネス化の話は聞こえてこないですね。これは、調査や採掘の技術への投資ばかりが先行しているためです。探して掘ったあと、持ち上げて輸送して、不要なものを廃棄し、精錬など使えるものにするといった、廃れてしまった技術への投資がないため、全体を俯瞰したサプライチェーンが構築されず商売にならないのです。
水中ドローンと社会課題を結びつけて考える
──日本が海をもっと使うためには、何が必要でしょうか?
吉田氏 :僕は、ロボット開発を社会課題解決に結びつけて考えることが必要だと考えています。日本はいま、世界でも類を見ないほどのスピードで、少子高齢化社会に向かっていますね。生産年齢人口の大幅な減少とGDPの低下という“負の連鎖”を食い止めるには、生産効率の向上が不可欠です。また、人口の都市集中は世界的にも加速していますが、地方市町村における機能維持不全を回避するためには、特に一次産業の生産性向上、既存インフラの維持管理、雇用やサービスの創出が必要です。

このようにバックキャスティングで考えていくと、例えばダムや河川、港湾などのインフラ点検や、地球温暖化や乱獲の影響で魚が獲れにくくなっている差分を埋めるための養殖業は、担い手不足も深刻ですから、ダイバーの代替となり得る自動化技術の社会実装が急務であるといえます。実際に使われ始めたら、いまは考えつかないような用途も、生まれてくると思いますね。
──具体的には、どのようながロボットが求められていますか?
吉田氏 :港湾点検や養殖など、浅い海で、高濁度で、水中に物体が多数あって、外乱や潮汐(ちょうせき)がある条件下でも使えるロボット。これがまずは必要です。人間が30m潜るとすると、10分、15分潜航するたび休憩を挟むけど、ロボットならずっと水中で作業できるからね。例えば養殖業では、清掃ロボット、捕獲ロボット、個体認識などの自動化は生産性向上が期待できます。そのためには音波・光・電波などのテレメトリ技術や、水中通信・測位技術、認識技術などが求められてきます。
──現状の水中ドローンや水中ロボットは、活用できますか?
吉田氏 :残念ながら、外乱がない平水なら、という条件付きになってしまう場合が多いかもしれません。というのも、日本のロボット開発は、環境対応性に目を向けてこなかったという歴史があります。また、いま市場に出てきている水中ドローンも、自己位置を測位できないため、位置を保持する機能がついていると謳われていても環境によっては相当難しいはずです。
「環境の複雑さ」を自律制御すべき
──いまの技術でもできることから進めて、一次産業やインフラ維持管理の生産性向上を図りつつ、水中ドローンの性能も上げていくことで自動化できる領域を広げていく必要があるということだと思いますが、技術開発のロードマップはどのように描いていますか?
吉田氏 :ちょっと専門的な話になってしまうけど、水中は陸上のロボットと違って、3次元空間を動かなきゃいけないよね。そのためにはXYZ軸の移動と、それぞれの回転機能が必要なんです。要するに、6軸の制御が必要。それなのに、プロペラが4つしかついていない機体では、どの軸からやってくるか分からないランダムな流れに対して、出力がないから根本的に抵抗できないわけですよ。
たまに、環境の複雑さを、自分の操作テクニックでどうにかできる方もいらっしゃいますが、その人がいなければロボットは使い物にならないし、操作が上手な方でも環境の複雑さに対応しながら何か作業までしようとすると、機体の制御が疎かになって機体はあっさり流されます。また、そういう専任オペレーターを要するのでは、コストがかさんで社会実装は進みませんよね。
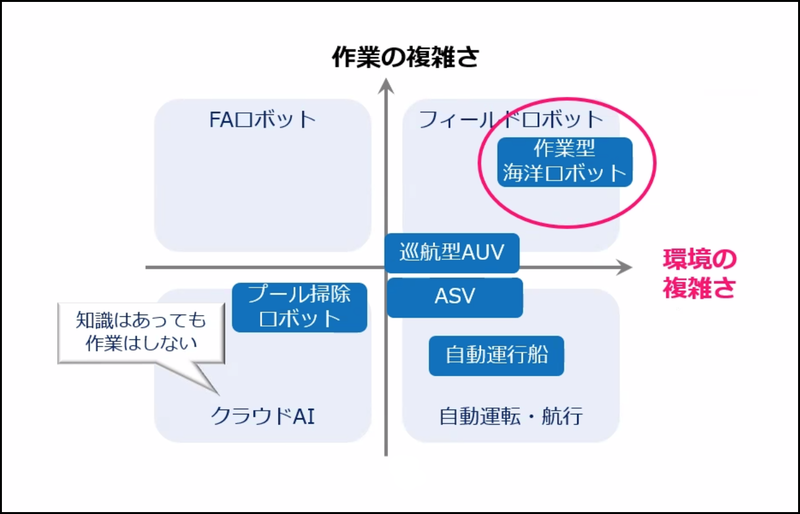
だから、まずは「環境の複雑さ」に対して、自動化を図っていくべきなのです。どういう環境にも即座に自分で対応して、人間が強風の中でも立っていられるような姿勢の制御はロボットに自律的にやってもらって、作業の複雑さについては遠隔で操作していく。あるいは簡易な作業のみ自動化する。このような方向性で段階的に技術開発を進めていくべきだと考えています。
──テザー(ケーブル)については、どうでしょうか?
吉田氏 :確かに、水中のロボットに紐がついていないことは、非常にいいことだよね。例えば、水中ドローンには100m程度のテザーがついている機体が多いけど、深く潜れば潜るほど、テザーにかかる流体抵抗が大きすぎて、推力が足りずに機体を制御できなくなるでしょう。
一方で、じゃあ無線にすぐできるかというと、通信技術はなかなか難しい。しかも、通信は一番大事なところだから、ちょっとでも途切れるとだめです。だから、測位装置は絶対にMUSTだけど、無線通信はWANTとなる。テザーをたくさん伸ばした場合には強い乱流が影響してくるけど、港湾くらいの深度であればそんなに長く伸ばさなくてもいいので、通信をあえて無線にして社会実装にかかる時間を延ばす必要は、最初はないのかなと思っています。
非常に端的にいうと、6軸全部の出力と自己位置推定の技術によって、「環境の複雑さ」に自律的に対応して、自動でロボットがあるところにピタッと止まれるようになることが、水中ドローンを産業化し社会実装していくのに、ミニマム必要な技術であると考えています。
──ちなみに、「環境の複雑さ」に対応する技術開発があまり進んでいないのは、なぜでしょうか?
吉田氏 :日本は過去のFA(Factory Automation)ロボットでの成功体験が強すぎるのです。そもそもFAロボットは人間が整備した安定した環境にある、ということが抜け落ちていて、自動で作業させる技術ばかりを開発する傾向があります。2000年代のグローバリズム以降は、研究開発も成果主義になり、「環境の複雑さ」に対応する研究には公的投資が回らず、民間もリソースを回す余裕がないまま、社会実装のための議論が止まってしまっているというわけです。
中期的には「自己位置測位」がブレイクスルーに
──測位装置ができるだけ安価に標準装備化されていくことが、ブレイクスルーポイントになりそうです。この自己位置推定は、どのような技術や動向がありますか?
吉田氏 :水中では、基準点から計測する絶対測位としては音波測位や電磁波測位が、自分がいまの位置からどれだけ動いたかを相対的に計測する技術としては慣性航法装置やドップラー速度計、それから画像処理技術のSLAMなどがあります。海中では一般的に音波を使って測位を行いますが、港湾内など水中や水底にコンクリートなどの反射物が多くあるところでは、数百万円もする水中測位装置を持って行っても使えないこともあります。
一番いいのは、加速度と角速度から自己位置を計算する慣性航法装置ですが、それなりな精度のものを求めると1000万円はかかる上、このクラスでも動き続けると誤差の蓄積で、1時間で1km程度ずれてしまうので、ドップラー速度計など別の装置でズレを補完する必要があるのです。いま、アメリカでは安価な慣性航法装置の開発を手がけるベンチャーなども出てきていますね。
実は、僕が委員長をつとめるUWT研でも、電磁波を使って水中測位をやるという研究を行っていて、技術的にはめどが立ってきたところです。とはいえ、1cmの精度でピタッと測位するのではなく、50cm~1m程度の精度。でも、そこまで近づけば東京湾などの透明度が低いところでもカメラでぼんやりとでも対象物を捉えることができる、そうすれば画像処理で機体を定位置保持することができるでしょう。いろんな技術を混ぜて使うことで、安く、効果的には、使えるようになると考えています。

──ありがとうございます。最後に、吉田さん個人としては、今後の海洋ビジネスにおいて、どんなことをしていきたいですか?
吉田氏 :日本人って、一人ひとりはだいたい いい人で、考えも素晴らしく、僕も嫌だなと思う方には滅多にお会いしませんが、集団化したときに物事が進まなくなる傾向があります。ですので、電磁波測位にしてもそうですが、自分から仕掛けていって前例を見せていくしかないのかな、と思い始めています。私の考えをサポートしてくれる識者の方々とも一緒に、大きな動きを作っていきたいですね。
──水中ロボコンなどのイベントや若手の育成も手がけられています。
吉田氏 :はい、水中ロボコンは何種類か、いろんなグループで携わっています。沖縄海洋ロボコン、こどもの理科離れをなくす会、これは水中だけじゃないですが、それから水中ロボネットが運営しているいろいろな水中ロボコンの3つです。水にロボットを浸ける防水耐水は難しいですが、そこは既存の技術があるので、学生さんの若い脳味噌を使うのならもっと新しい技術を磨いて欲しいですね。
陸上の農業用マシンだって、同じことがいえます。美味しいお米を作るなどの日本の本当の強みは、アメリカ式農地ではなくて、段々畑とかでしょう。日本はロボット化となったら先に環境をきれいにして、ロボットが動けるようにしようという風に頭を動かしがちで、作業の複雑さを自動化しようとする傾向がありますが、本来はそうではなくて、日本の強みを生かしたままそこを自動化するというのがいいだろうと思います。より高性能な環境対応が、いろいろなところで必要になる、それがわが国なのではないでしょうか。
【藤川理絵の水中ドローン最前線】 vol.1「水中ドローン」とは
-2021年版 水中ドローンの役割、効果、市場規模、課題と今後の展望まとめ-
https://drone-journal.impress.co.jp/docs/special/1183422.html
本特集は、2020年12月にインプレス総合研究所が発行した『水中ドローンビジネス調査報告書2021』にさらに情報を整理し、詳細をまとめています。詳細を知りたい方は以下のページよりご確認ください。無料サンプルPDFのダウンロードも可能です。
水中ドローンビジネス調査報告書2021
執筆者:藤川理絵、インプレス総合研究所(著)
発行所:株式会社インプレス
判型:A4
ページ数:172P
発行日:2020/12/23
https://research.impress.co.jp/rov2021