2022年3月9日、国土交通省「海の次世代モビリティの利活用に関する実証実験」の令和3年度採択事業6つの最終成果報告会が実施された。前編では、東京大学 浦環名誉教授が登壇した基調講演の概要を紹介したが、後編となる本稿では、いであ、NTTドコモ、静岡商工会議所、長崎大学、マリン・ワーク・ジャパン、三井造船特機エンジニアリングによる、令和3年度採択事業の成果報告について概要を紹介する。
いであ – ホバリング型AUV「YOUZAN」の活用
いであは、「ズワイガニ資源量推定におけるAUV活用」について発表した。実証実験の共同実施者は、福井県水産試験場、東京大学 生産技術研究所、九州工業大学、社会ロボット具現化センター。
福井県では、ズワイガニ漁獲量の減少に伴って、水産業基本計画の重点戦略として「越前がに」の資源増大を掲げているという。保護礁の設置や作澪など、対策を実施した効果確認や正確な資源量把握が求められており、今回はホバリング型AUV「YOUZAN」を用いて、これらに取り組んだ。
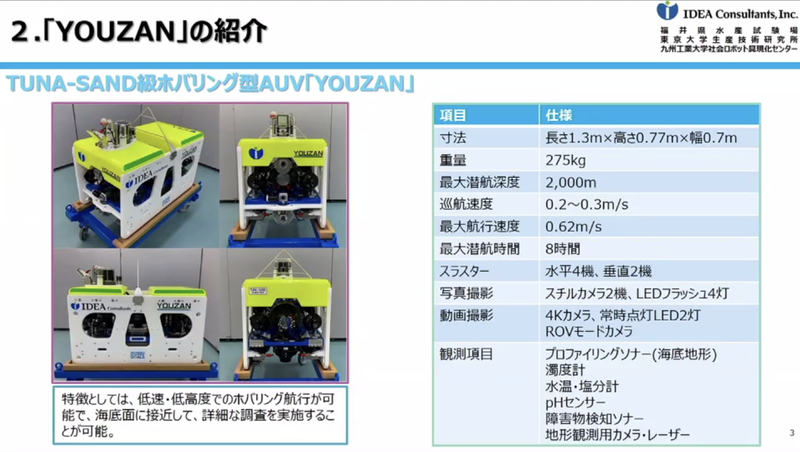

従来、資源量調査の方法として用いられてきた「トロール」「曳航式カメラ」と比較して、「ホバリング型AUV」のメリットは、無索(ケーブルがない)であること。また、障害物回避機能を有しているため、保護礁のように障害物のある海域でも調査が可能になるという。
実証実験では、ホバリング型AUV「YOUZAN」が保護礁内で予め設定されたプログラム通りに調査を行い、海底を撮影。面積と、出現した個体数から、生息密度を推定した。調査区画は保護礁1、作澪箇所1で、近年漁獲量が減少して「カニはいるのか」と漁業者からも懸念の声が上がっているところを選定したという。
結果は、出現した個体の撮影や個体数および生息密度の算出はもちろん、稚ガニの確認、雌雄の区別、精度の高いサイズ測定もでき、資源量推定に必要なデータが得られた。また同時に、有用底生生物の生息密度も測定。機械学習による生物検知も試み、出現数が少ない個体に対応できないなど課題はあったが、精度向上によってAIによる自動検知が可能になると見通しの立つ、良好な成果を得られたという。
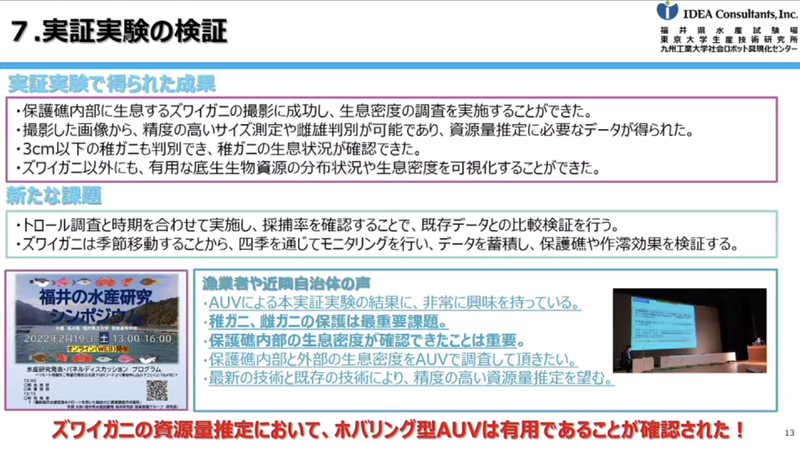
今後の課題は、従来の調査方法と時期を合わせて調査を実施して、既存データとの比較検証を行うことや、通年でのモニタリングによる効果の把握だ。こうした課題をクリアすることで、水産業における資源量調査という分野において、技術の普及を図りたいという。
NTTドコモ – 「Blue ROV2」「FIFISH V6 PLUS」×「ICTブイ」の活用
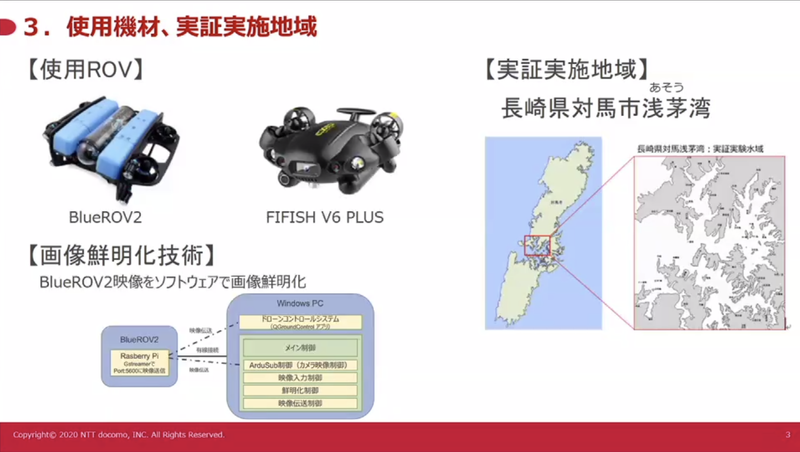
NTTドコモは、「真珠養殖業におけるROVを活用した海洋環境調査の有効性実証」について発表した。共同提案者には、対馬真珠養殖漁業協同組合、長崎県対馬振興局が参画。画像鮮明化技術などをNTTデータ、ROVの提供や操縦などをSIX VOICE、海底泥の成分検査を公益社団法人 長崎県食品衛生協会が担った。
背景には2つの課題があった。1つめは、アマモ場造成による漁場改善が求められていること。2つめはアコヤ貝稚貝大量へい死の原因が解明されていないこと。実証の目的は、ROVを活用した海中状況の可視化で課題解決に貢献することだ。
アマモ場造成による漁場改善においては、「BlueROV2」で海底映像を撮影して、各候補地がアマモ造成に適するかを判断。また、同じく「BlueROV2」を用いて150g以上の海底泥を採取し、粒度組成を含む4項目の泥質検査を行い、そのうえでアマモ場に適した候補地の選定を行った。
稚貝大量へい死の原因解明においては、「FIFISH V6 PLUS」を使って篭の汚れ具合や網目の状態を確認した。海中にある吊り下げ提灯籠を底から確認できたときは、真珠養殖業のベテランからも「籠の入れ替えタイミングの判断材料になるため、メンテナンスの効率化に役立つ」と高評価を得たという。また、画像鮮明化技術をプラスすることで、海中や籠の様子をはっきりと確認できるため、周囲にいる魚などを広範囲に確認して食害対策に活用する、深度ごとのプランクトンを可視化して海中環境を把握するなど、さまざまな貢献が期待できる。

また、へい死の原因究明では、同社がかねてより提供してきた「ICTブイ」から取得できるデータも活用。今後は、ROVとICTブイの組み合わせで、様々な時期での映像や水質のデータを蓄積して、アコヤ貝稚貝大量へい死の原因解明に継続的に貢献しながら、長崎県各地でのイベント実施、事業化の推進や他の地域での展開を図る予定だ。

静岡商工会議所 – 「DiveUnit300」×ローカルシェアモデル
静岡商工会議所は、「ローカルシェアモデルによるROVを用いた港湾施設点検の実用化実験」について発表した。静岡商工会議所がプロジェクト管理を行い、地元企業である柿澤学園、堀谷、大日工業がROV操作を担当。指導や支援という立場から、MaOI機構(静岡県)、MICCS(静岡市)、鉄組潜水工業所が参画し、ROVの提供や教育訓練などは国産水中ドローンメーカーであるFullDepth、ROVの機能評価と報告書作成は建設コンサルタントセンター、ROVの機能評価は平野潜水事務所が担当した。
着眼点は2つ。国内の港湾施設の多くは老朽化が進む一方で、点検業務を担う潜水士の高齢化、人材不足が進行しているという点。そして、高価なROVや水中機器を活用するにあたり、地元事業者が共有して初期投資の負担を軽減することで、導入するハードルが下がるのではないかという点だ。
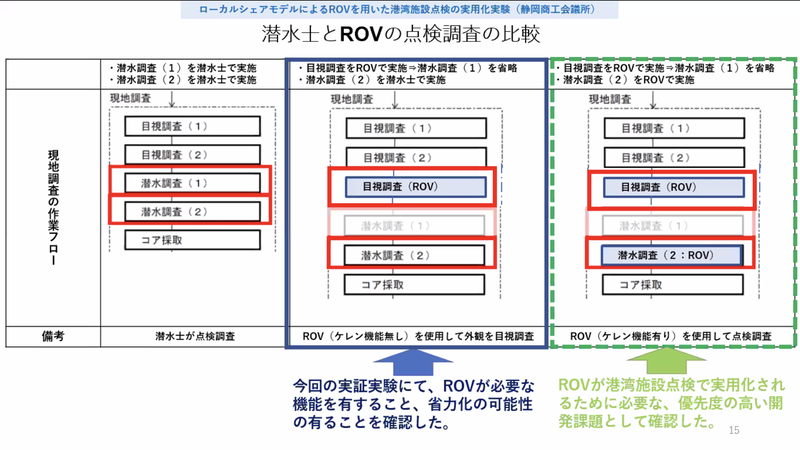
実証実験では、清水港でROVを用いた港湾施設の目視点検を行った。適切な点検マニュアルを作成することを目的に実施したという。点検実施対象施設は、「ケーソン式」「矢板式」「桟橋式」の3つだ。点検箇所ごとに、潜水士が行った場合と稼働時間や人員体制などを比較して、導入効果や事業化の可能性を探った。
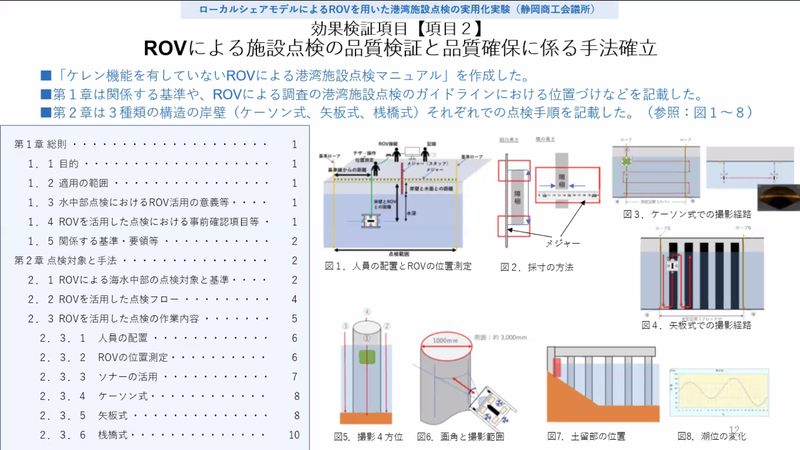
機材は、FullDepth製の「DiveUnit300」に、BluePrint Subsea社製のOculus M750dを搭載して使用した。今回は、点検面に付着した海棲生物を除去するケレン機能を備えていなかったため、本実験では国の港湾施設点検のガイドラインにある、潜水士が行う潜水調査(1)と(2)のうちケレン作業を行わない「潜水調査(1)」に該当する機能を検証した。海棲生物を除去して行う潜水調査(2)を代替するためには、ROVがケレン機能を備える必要があるという。

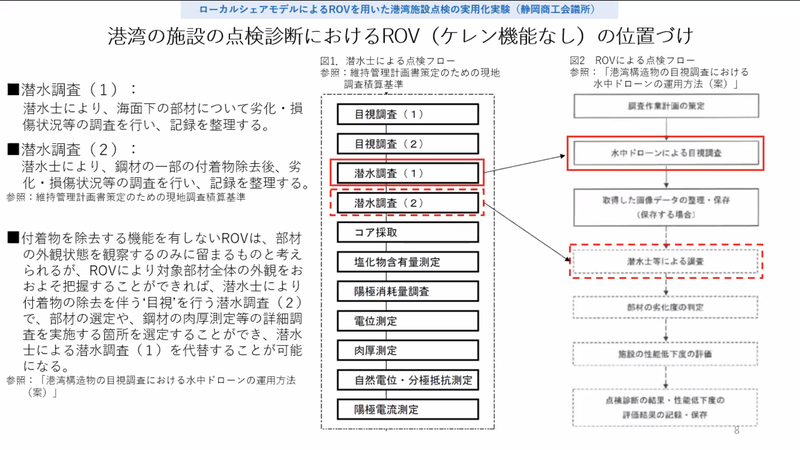
「DiveUnit300」で取得した水中映像を、点検現場にいる評価者が陸上からPCモニターでリアルタイムに目視し、鋼矢板の素地露出、赤錆などの変状確認、電気防食の陽極の採寸などを行うことができた。また、ケレン作業による詳細点検が必要な箇所の抽出も可能であると判断できたという。
潜水士との比較は、2つの観点で行った。1つは「1日の点検作業面積」だ。これは「点検にかかる作業時間」と「1日の稼働時間」から求めた。結果は、「ケーソン式」と「矢板式」ではROVより潜水士の方が同等または若干広く、「桟橋式」では潜水士の方がかなり広いと想定されたという。
「ケーソン式」と「矢板式」では、ROVの方が潜水士より若干作業効率が劣るものの、これは現場に設置したモニターで評価する評価者の評価速度に依存していた。「桟橋式」では、1本の鋼管杭で4回潜水を繰り返すために、潜水士よりかなり時間がかかると想定された。また、1日の稼働時間は、ROVは7.5から8時間、潜水士は5〜6時間だった。今回の実験の水深は7mだったが、10mより深く潜る場合は潜水士の1日の作業時間はさらに短くなるという。
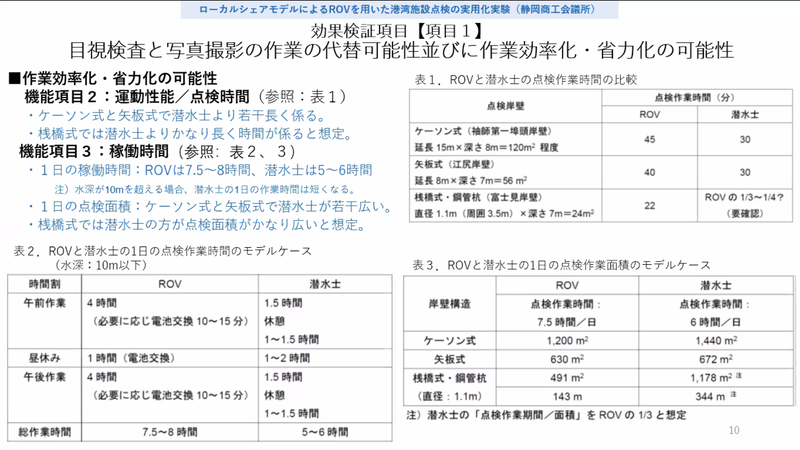
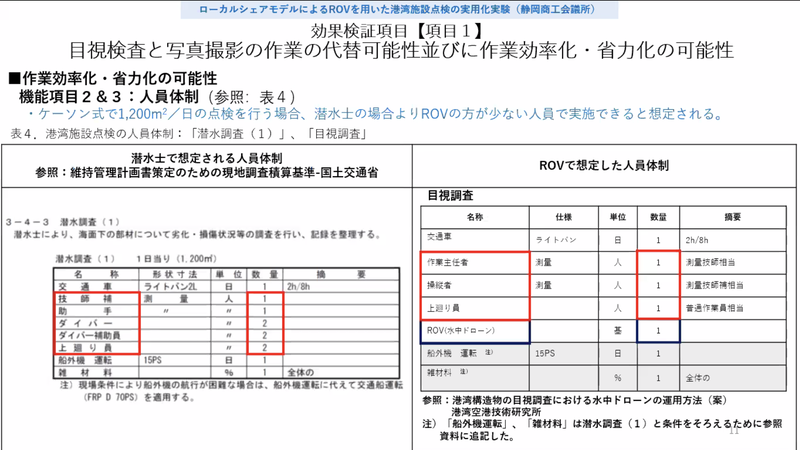
もう1つは、「人員体制」だ。国の設置した基準によると、「ケーソン式」で1日1200平米の点検で、潜水士が行う場合は、潜水士2名を含む計8名であるが、ROVでは人員3名とROV1機で、潜水士の場合よりROVの方が約1/2と、ROVの方が少ない人員で実施できることが分かった。
このほかの成果物として、「ケレン機能を有していないROVによる港湾施設点検マニュアル」の作成、必要な技能の取得が短期間でも可能であることが明らかになった。ローカルシェアモデルについても評価会議を実施し、実現に向けた課題を提示できた。
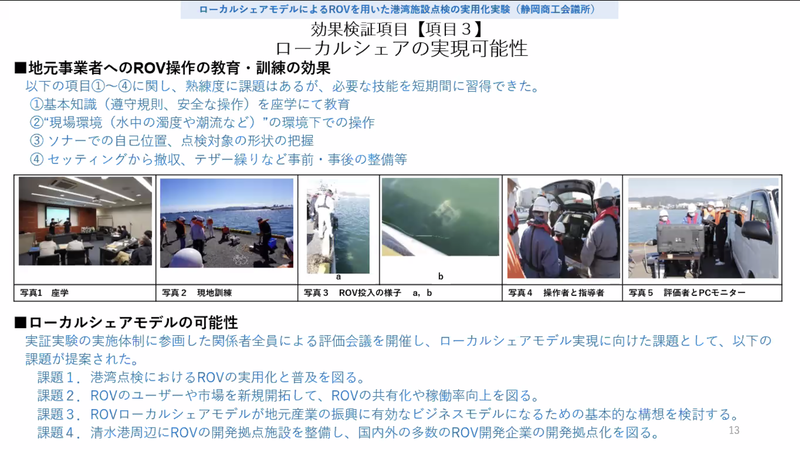
今後は、ケレン機能付きのROV開発を支援し、清水港における実証実験を通じて、ROVの潜水調査(1)と(2)の、地元事業者によるサービス事業化を目指すという。
長崎大学 – ASV・ROV一体型の海上海中海底調査システム
長崎大学は、「海洋ごみ問題解決のための『ASVと自律型ROVの一体連動による海上・海中・海底調査システム』の実用化」について発表した。長崎大学、夢想科学、一般社団法人 対馬CAPPAがチームを組んで取り組み、長崎大学ながさき海援隊が実証実験補助、対馬市役所が漁業組合の仲介などで協力した。
対馬は、複雑に入り組んだ海岸線に、海外から大量のごみが漂着し、漁業や生態系、観光業などへの悪影響が懸念されている。すでに、6地点で定点観測データを取得して漂流ごみの把握を行い、漁船を使った活動なども含めて全島38か所で回収作業を実施しているが、人が入れる海岸が少ないため、手付かずのままの多くの海岸には、漂流ごみが溜まり続けているという。さらに、海中海底ごみに至っては全く手付かずのため、海洋マイクロプラスチックの問題との関連性も含めて、調査が求められている。
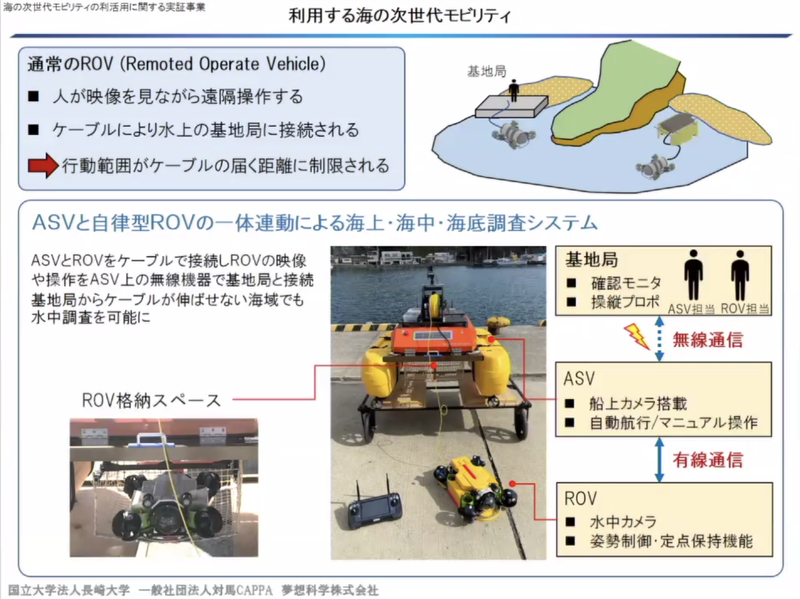
そこで、「ASVと自律型ROVの一体連動による海上・海中・海底調査システム」を開発して、漂着ごみおよび海中海底ごみの観測を実施した。通常のROVは、人が映像を見ながら遠隔操作するため、行動範囲がケーブルの届く範囲に制限されるが、ASVに無線通信の基地局を設置し、ASV経由でROVの操作や映像伝送することで、陸から離れた場所でも水中調査が可能になる。また途中で、映像遅延も発生したが、改善できたという。
第1回目の実証実験では、ASVが予め設定した観測ポイントに沿って自律航行し、ASVに水中カメラを装備して海中ごみを観測した。同時に船上のカメラでは、人が入れない無人地帯の海岸への漂着ごみを観測した。第2回目は、ASVとROVを合体して観測ポイントまで行き、目的地点でROVをASVから離脱させてROVによる映像取得を試みた。ROVの遠隔操作は船上から行った。海中の漁礁を確認できたほか、3Dのオルソ画像作成も実現したという。
第3回目は、1、2回目の集大成として、ASVとROVの一体連動による海中海底ごみの観測を実施。どこにどんなごみがあるのかを把握した取得データは、Google Earthのプロジェクト上で共有した。今後も調査とデータ蓄積を続けることで、海中海底ごみと漂着ごみの関連性を分析して、効率的なごみ回収へと役立てるという。


マリン・ワーク・ジャパン – 車で持ち運べる小型ASVの活用
マリン・ワーク・ジャパンは、「小型ASVを用いたウニ密度マップによる効率的な駆除方法の検討」について発表した。マリン・ワーク・ジャパンが中核となり、共同提案者として東京海洋大学、神奈川県横須賀市の長井町漁業協同組合、横須賀市が参加し、チームで取り組んだ。
マリン・ワーク・ジャパンは、神奈川県横須賀市に拠点をおく企業だ。地域に根ざした活動をするなかで、地元の長井町の漁師さんと知り合い、「地元の横須賀市で、磯焼けが深刻になっている」と知る機会を得たという。また、磯焼けの原因となる毒ウニのガンガゼは、素潜りや刺し網による直接的な除去を行っているが、漁業者の方の高齢化や少数化も深刻、人間が潜水している5〜10m以深ではウニの生息状況も不明など、課題は山積みだった。
実証実験では、東京海洋大学が開発した小型ASVを使い、水中カメラやサイドスキャンソナーを搭載して、海底映像や地形データを取得しリアルタイムに陸の基地局へ伝送、AIによるウニ画像解析を行い、ウニ密度マップを作成した。さらに、作成したウニ密度マップを用いて、駆除作業の効果検証も行ったという。
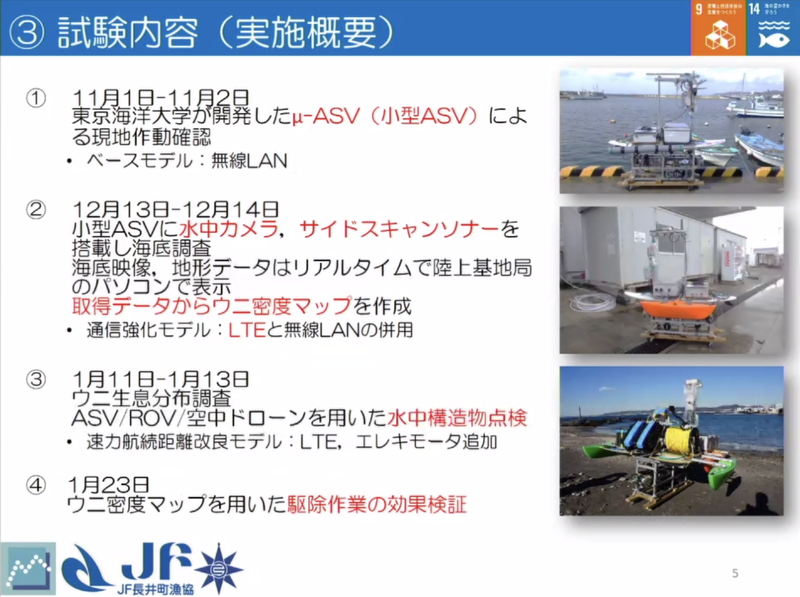
ウニ密度の高いところは赤色、低いところは黄緑色と、ウニの高密度地点をAIで解析し、その地点を目掛けて2名のスキューバダイビングによる駆除を実施。結果は、1時間で1人あたり280個以上のウニを駆除でき、過去実績との比較では約1.9倍も効率化した。また、約1時間で1ヘクタールを調査できたことから、広範囲の調査結果をもとに、限られた人数と時間で効率的なウニ駆除作業が可能であることが確認できた。

また、利用可能性の検証として、ASVとROVや空中ドローンを組み合わせた水中構造物点検も実施した。空中ドローンで調査海域の俯瞰情報を捉えながら、ASVは定点保持したままの状態でROVを遠隔操作し、ASVに設置した基地局を経由してROVの取得映像をリアルタイムに見て、水中構造物の状態を確認することに成功。ASVをプラットホームとして活用できることが分かったという。
ASVはGPSをもとに自動航行でき、何度も同じ経路を航行できるのもメリットの1つ。今後は、ウニ密度分布の調査やモニタリングを行う新規事業のほかにも、藻場の調査などの事業化も検討する構えだ。
三井造船特機エンジニアリング – あらゆるROVに搭載できる「ベントス回収装置」
三井造船特機エンジニアリングは、「ROV搭載型ベントス回収装置の実証実験」について発表した。三井造船特機エンジニアリングと、東京海洋大学、志摩市役所、三重県立水産高等学校が共同提案者となって、三重外湾漁業協同組合の安乗事業所と和具事業所が協力した。水産高校が参加することで、地域連携強化や後継者育成強化を図ったほか、令和4年度の新学習指導要領でスタートする水中ロボット教育にマッチした取り組みになるよう配慮したという。
目的は、潜水士が行っている磯焼けの原因となるウニの駆除や、養殖生簀内のへい死魚回収作業を、ROVで代替することだ。水深10m以上での作業は身体的にかなり負担が大きいことや、潜水と浮上を繰り返すことによる減圧症の恐れなど、人体へのリスクを念頭に置き、作業の効率化と安全性の向上を図った。
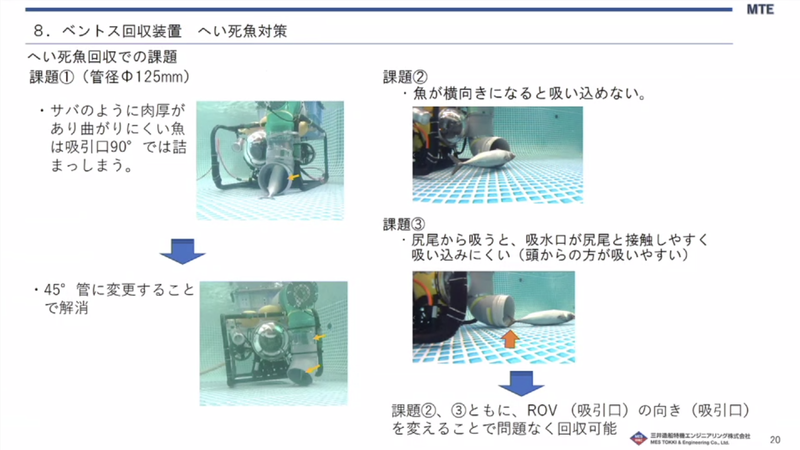
「ベントス回収装置」の開発で、着眼したポイントはこうだ。ガンガゼの棘はゴム手袋やウエットスーツを貫通してしまい、1回刺さるとなかなか取れず、非常に強い毒性を持つため危険性がとても高い。また、へい死魚は腐敗が進むと脆くなって回収しにくくなるという特性があった。
他方、現在すでにある技術は、マニピュレーターもスラープガンも、対象物を1つずつ採取するため、大量回収には不向きという事情もある。今回開発された「ベントス回収装置」は、水中モーターを回転させ水流を発生させ、掃除機のように対象物を下側から吸い取って回収する仕組みで、連続作業が容易になる。吸い取ったものは回収籠に送られる。
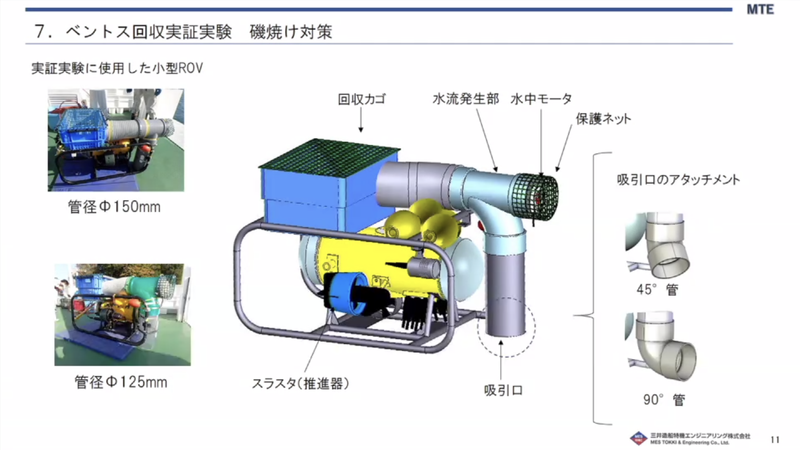
一般に販売されているポリ塩化ビニル管を使うことで、管径サイズや吸引口の形状のラインナップが豊富で、かつ低価格化を図ることができる。また、多様なROVに搭載できることを念頭に置いて開発を進めたという。
「産学官連携して行ったことが非常に有意義だった」とのことで、今後は製品化、社会実装に向けた活動を展開していくという。
藤川理絵の水中ドローン最前線
vol.1「水中ドローン」とは
-2021年版 水中ドローンの役割、効果、市場規模、課題と今後の展望まとめ-
vol.2 海洋ビジネスと水中ドローン
-海洋研究開発機構(JAMSTEC)吉田弘氏が語る「水中ドローンの課題と展望」-
vol.3 福島ロボットテストフィールドの活用
-一般社団法人日本水中ドローン協会、多様な機体で研修実施-
vol.4 水中ドローンニュースまとめ(2021年1月~3月)
-海中旅行、CHASING新機種、ロボテスEXPO、牡蠣養殖場での実証や海洋DXの取り組み-
vol.5 「陸側」での水中点検事例
-管渠、ダム、浄水場など、ジュンテクノサービスNETIS登録の狙い-
vol.6 東京久栄の事例
-水中ドローン活用30年、管路・水路・ダム・漁礁での使い分けとは-
vol.7 スクール潜入レポート
-水中ドローン安全潜航操縦士講習とは? 座学・実技から使用機体まで解説-
vol.8 海の次世代モビリティ
-国交省「海における次世代モビリティに関する産学官協議会」とりまとめを発表-
vol.9 養殖業での事例
-網の汚損点検、アンカーの捜索、死魚回収まで、活用法の模索が進む-
vol.10 日本ROV協会が本格始動
- 一般社団法人日本ROV協会の事業概要、技能認定講習、今後の展開とは-
vol.11 DiveUnit300の新機能
-フルデプス、ホバリングなどのオプションと各種アタッチメントを発表-
vol.12 広和ROVやBoxfishの操縦体験も
-「海のアバターの社会実装を進める会」福島RTFで2日間開催-
vol.13 NTTドコモの事例
- ICTブイ、5Gやクラウドとの連携を見据えた、「養殖DX」におけるROVの活用-
水中ドローンビジネス調査報告書2021
執筆者:藤川理絵、インプレス総合研究所(著)
発行所:株式会社インプレス
判型:A4
ページ数:172P
発行日:2020/12/23
https://research.impress.co.jp/rov2021