
2025年3月、国土交通省は「無人航空機の多数機同時運航を安全に行うためのガイドライン 第一版」を公表。これは多数機同時運航、いわゆる1人の操縦者が複数のドローンを運航する「1対多運航」に関する安全要件を、航空法に基づく規制体系の中で初めて体系的に整理した文書である。
▼国土交通省-無人航空機の多数機同時運航を安全に行うためのガイドライン 第一版
https://www.mlit.go.jp/koku/content/001880139.pdf
▼無人航空機の多数機同時運航に向けたガイドラインを公表―安全確保のポイントとは?
https://drone-journal.impress.co.jp/docs/special/1187187.html
このガイドラインは、2024年10月に設置された「多数機同時運航の普及拡大に向けたスタディグループ」での検討を踏まえて策定された。あわせて2025年3月には、航空法における無人航空機関係の解釈通達も改正されている。対象となるのは、レベル3またはレベル3.5飛行、すなわちカテゴリーⅡ飛行における、各機体を独立して制御する形態の運航である。操縦者1人あたりの機体数は最大5機までとされ、人間の目による監視を前提としている。
ガイドラインが示した「機体・操縦者・運航管理」の三本柱
ガイドラインの第3章では、多数機同時運航に固有の要件として、機体、操縦者、運航管理、そして運航リスクの検証と対策例が整理されている。
特に重要なのが、操縦者に求められる要件だ。多数機同時運航では、1機を監視・操作する場合とは異なり、複数の機体で同時に不具合が発生する可能性や、同一運航主体の機体同士が想定外に接近するリスクがある。そのため、操縦者には多数機同時運航固有のリスクを理解する知識に加え、異常が発生した機体への対応と、他機の運航監視を両立させる能力が求められる。机上訓練と実機訓練を通じて、段階的に同時運航機数を増やしながら習熟することも要件として示されている。
運航管理の面では、組織の要件として異常発生時に対応できるかを事前に検証すること、直接関与者の役割分担を明確にすること、ヒヤリハット情報の共有体制を持つことなどが求められている。ここから読み取れるのは、多数機同時運航は操縦者個人の技能だけで成立するものではなく、組織全体の安全管理能力によって支えられる運航形態だという考え方である。
NEDO ReAMoプロジェクトが支える1対多運航の社会実装
こうしたガイドラインの土台になってきたのが、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)が2022年度から進めている「次世代空モビリティの社会実装に向けた実現プロジェクト(通称:ReAMoプロジェクト)」だと私は思っている。ReAMoでは、機体性能の評価手法や運航管理技術の開発に加え、操縦者1人が複数のドローンを安全に運航するための要素技術、そしてその性能評価手法の開発が進められてきた。
▼ReAMo-ReAMoプロジェクト ドローンの1対多運航を実現する適合性評価手法の開発「無人航空機の多数機同時運航を含む飛行の許可・承認取得に向けたチェックリスト(カテゴリーⅡ飛行)v.1.0」の公開
https://reamo.nedo.go.jp/topics/3079
ガイドラインが公表された同時期には、ReAMoから「無人航空機の多数機同時運航を含む飛行の許可・承認取得に向けたチェックリスト(カテゴリーⅡ飛行)v.1.0」も公開された。これは、事業者が国土交通省へ飛行許可・承認申請を行う際に、ガイドラインの内容と実務上の確認項目を対応させるための資料といえる。制度文書としてのガイドラインと、申請実務を支えるチェックリストがそろったことで、多数機同時運航は実証段階から実装段階へと一歩近づいた。
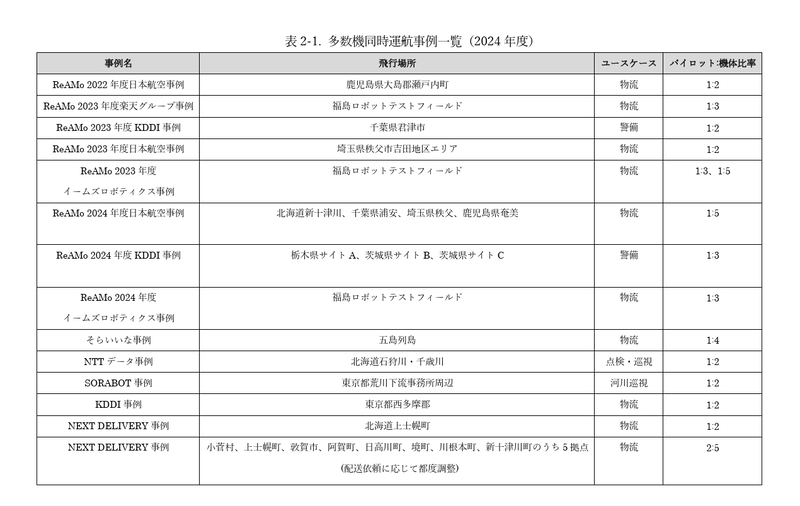
国内の事例を見ると、物流、太陽光発電施設の巡回・侵入警備、島嶼間配送など、用途は一分野に限られておらず、多様なユースケースをカバーしている点が興味深い。多数機同時運航は、単に「少人数で多くの機体を飛ばす」ための技術ではなく、人手不足、広域監視、遠隔地配送といった社会課題に対して、ドローン運航の生産性を高める手段として位置づけられつつある。
さらに2025年6月には、NEDOのReAMoプロジェクト新規公募において「1対多運航」テーマでJALを採択したことが発表された。JALは、物流をはじめとする複数ユースケースを想定し、運航管理システムと連携したレベル3.5およびレベル4での多数機同時運航を実証する計画を示している。これは、第一版ガイドラインが主な対象としたレベル3・3.5の範囲を超え、将来的には有人地帯での補助者なし目視外飛行、すなわちレベル4での1対多運航も視野に入っていることを意味する。
また、ReAMoでは「多数機同時運航に関する海外調査レポート」も公開している。米国ではPart 107、Part 135、Part 21、Part 61、Part 91といった連邦規則の整理に加え、Amazonに発行された18601D Exemption等の内容などが参照されており、カテゴリーⅢ相当の多数機同時運航を日本で制度化していくうえで参考になる情報が盛り込まれている。
▼PwCコンサルティング-多数機同時運航 海外調査レポート
https://reamo.nedo.go.jp/library/2025/09/ReAMo_one-to-many-drone-operations_deliverable_overseas-research-report_r3.pdf
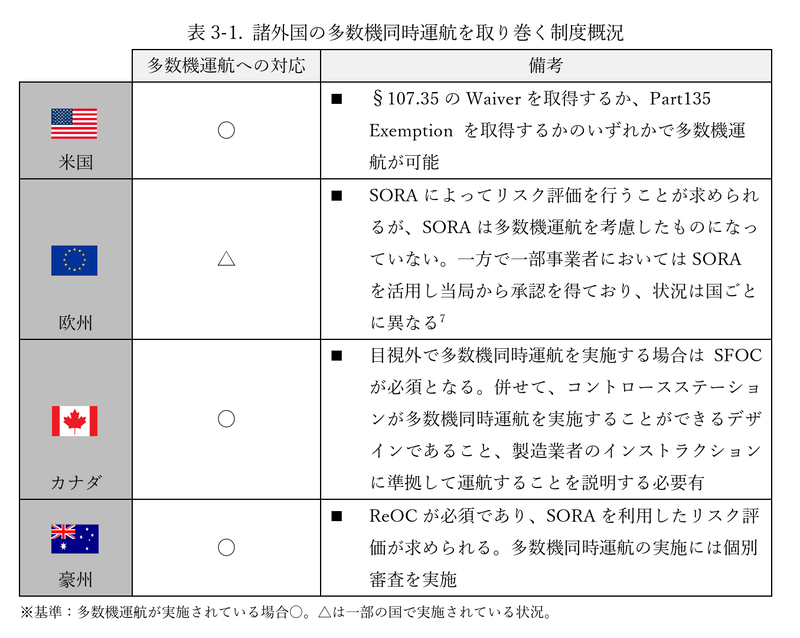
海外制度の変化として現在注目されているのがカナダだ。2025年11月4日に新規則が発効され、それ以前は「複数UAVを単一制御ステーションから運航」するには特別飛行証明書SFOCが必須であったが、Level 1複雑運航証明書(RPOC)の枠組みで1対多運航が正式に導入され、オペレーターの認証制度のもとでSFOCを不要とする制度変化が始まっている。従来はSFOCによる個別承認が必要だった領域について、認証制度を通じてより定常的な運航へ移行しようとしている点は、日本にとっても示唆が大きい。
▼Government of Canada-2025 Summary of changes to Canada’s drone regulations
https://tc.canada.ca/en/aviation/drone-safety/2025-summary-changes-canada-drone-regulations
さて、このガイドラインが発行されてから約1年が経過した。今後、多数機同時運航はどのような方向へ発展していくのだろうか。
まず考えられるのは、現在の「1人で最大5機」という枠組みから、海外の一部事例で見られるような「1:10」など、さらに多くの機体を同時に運航する方向である。もう一つは、JALがReAMoプロジェクトで目指しているように、レベル3・3.5からレベル4へと運航レベルを引き上げ、より高度な安全性と社会実装を実現する方向性だ。そしてもう一つは、特定用途に限られていた実証が各地で一般化し、「多数機同時運航」が特別な取り組みではなく、日常的な運航形態として定着していく可能性である。
これらはいずれも、安全性の確保と安全証明、制度設計、市場ニーズ、さらには社会受容性と密接に関わるテーマだ。本コラムでは今後、リスク評価と安全検証という観点を軸に、多数機同時運航の将来像についてシリーズ形式で整理していきたい。
「1:5」は理論ではなく、現場の経験から導かれた数字
なお、冒頭で触れた国土交通省のガイドラインでは、「1人で5機まで」という基準について、その背景も説明されている。
ガイドライン本文によれば、先行的に多数機同時運航を実施した事業者へのヒアリングでは、「少なくとも5機を超えると、現在実施可能な監視方法では限界を超える可能性がある」という見解が示されている。つまり、「1:5」という数字は机上の理論や抽象的なリスク評価だけで決められたものではない。実際の運航現場で複数機運航を経験した事業者の知見を踏まえた、極めて実務的かつ定性的な判断なのである。
一方で、ガイドラインでは将来的な拡張可能性も示唆されている。機体の自動化・自律化が段階的に進展し、さらに合理的なリスク対策が組み合わされれば、1人の操縦者が管理できる機体数を増やせる可能性があるという考え方だ。
では、その「どこまで増やせるのか」は、どのように判断されるべきなのか。現在の「1:5」は現場経験に基づく定性的な基準だが、将来的には、操縦負荷や異常発生率、監視能力などを数値化し、定量的に安全性を評価するアプローチが求められることになるだろう。
次回は、この「定量的な安全判断」が可能なのかという視点から、多数機同時運航の安全評価について掘り下げていきたい。
Global Drone News
Vol.12【パリ航空ショー2025】空飛ぶクルマの未来が現実に!現地レポートで見えた商業化の最前線
Vol.11 NUSTLの「Blue UAS」レポートを読む!米国の災害対応におけるドローンの可能性
Vol.10 米国・欧州で2025年に待ち受けるドローン環境整備の変化
Vol.9 次世代エアモビリティと空飛ぶクルマの実現に向けた航空交通管理の新しい視点と課題
Vol.8 次世代エアモビリティ(AAM)社会実装に向けた世界の都市の取り組み ①
Vol.7 米国、連邦航空局のSafety Continuumからドローンのリスクを考える
Vol.6 米国、連邦航空局(FAA)によるドローンの環境整備を振り返る
Vol.5 欧州の自治体ネットワーク「UIC2」が取り組むUAMの社会実装
Vol.4 ドローン・空飛ぶクルマの運航管理、欧州のSESAR 3 JUが狙うイノベーション「U-space」を解説
Vol.3 世界の航空関連情報が集まるICAOのドローンに対する取り組みを解説
Vol.2 ドローンの運用前に一読しておきたい「運航リスク評価ガイドライン」のポイントとSORAとの関係性
Vol.1 ドローンを取り巻く海外の組織構造から見る環境整備
中村裕子
一般財団法人総合研究奨励会 日本無人機運行管理コンソーシアム(JUTM)事務局次長:イノベーションマネジメント、ドローンリスク管理、低高度空域運航管理(UTM)、国際標準規格化の研究に従事。イノベーションの実現に向けて各種ネットワークの運営に従事―現職の他、JUIDA参与、航空の自動化/自律化委員会主査、無操縦者航空機委員会(JRPAS)幹事、エアモビリティ自治体ネットワーク(UIC2-Japan)発起人など。東京大学出版会「ドローン活用入門:レベル4時代の社会実装ハンドブック」編者。