“前回と今回の違い”を1枚の画像に色で表示する
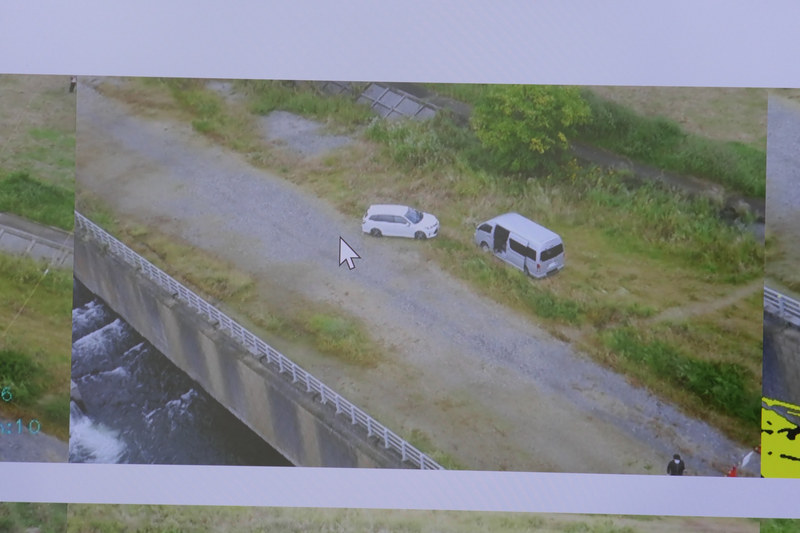
狛江市側の離陸地点を現地オペレーターの操縦で離陸したドローンは、上空で自動航行に切り替えられた後、搭載カメラで動画を撮影しながら決められたルートに沿って飛行。約800mの周回ルートを飛行した後、再び手動操縦に切り替えてドローンは狛江市側の河川敷に着陸した。狛江市、川崎市の両拠点のモニターには、パナソニック システムデザインのドローン遠隔オペレーションシステムの画面上に、ドローンの飛行ルートと、ドローンが撮影したライブビュー動画を表示。

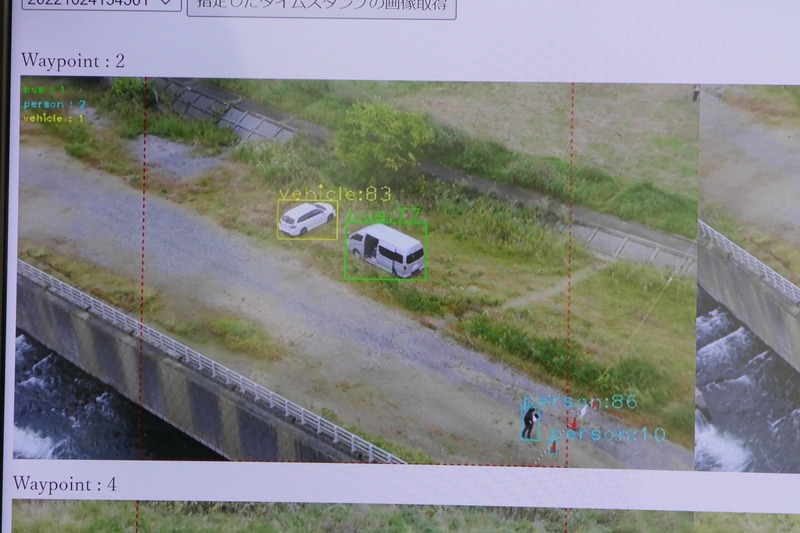
あらかじめ決められた地点に人や車といった物体を検知すると、異常を示すマークがルート上に表示された。このAIによる異常検知は、50cm四方の異物を発見したいというニーズに応えたもので、 “恒常的な駐車”や“不法係留”、“無許可の耕作等”といった、国土交通省河川局が定める河川巡視規定の巡視項目に沿った形で、人と自動車、ボートや船舶、バイクを検知する。

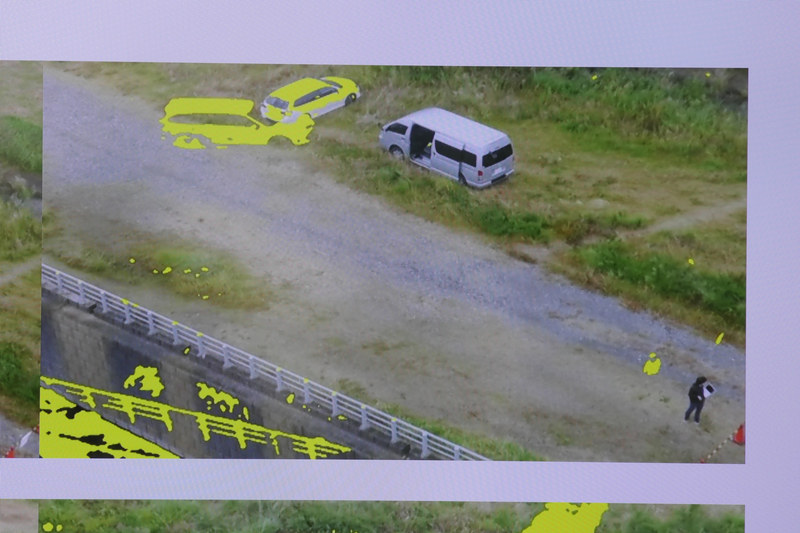
さらにこの日は同じルートを2回飛行。1回目に対して河川敷に駐車した自動車の位置やテントの形などの状況を変えて2回目の飛行を行った。パナソニック システムデザインが運用しているクラウドストレージには、設定したポイントの1回目、2回目の静止画と、その静止画をもとに差分解析した画像がリアルタイムで記録されている。コンパニオンコンピューターには動画が記録されており、着陸後に動画を用いて設定したポイント以外で同様の分析を可能としている。確かに、2回目の飛行後にクラウド上の画像を見ると、移動前の状態が黄色くかたどられて示されていた。

今後は異常検知の精度向上や差分解析の対象拡大が課題
異常検知AIや差分解析はすべて、ドローンに搭載されたコンパニオンコンピューターで処理している。こうした処置をクラウドで行うのではなくドローン側で行うのは、素材となる画像を今の4G LTE携帯電話ネットワーク経由でクラウドに送るのは負荷が大きいためだという。また、カメラが撮影した映像をもとに処理するため、天候や太陽光線の角度によっても結果に影響がでることが考えられるが、「前処理で画像にフィルターをかけて、モノクロ的に色彩を扱うことで、光線状態の影響を少なくしている」と三原氏はいう。また、差分解析では差分を検知するものの、動画から一定間隔で切り出した画像を解析するため、画像の画角に対して前回と今回の位置のずれが発生してしまうなど、少なからず撮影による影響を受けてしまうのが現状だ。
今回デモンストレーションを行ったこのソリューションは用途に合わせたチューニングが必要であり、最適な設定値を検証している。この日のフライトの中でも「不法係留を想定して設置しておいたボートの検知ができなかったので、異常検知のAIの精度向上が必要。また、差分検知に関してもまだできることはあり、例えば今は自動車とボート、船舶、モーターサイクルとなっている検出対象を、テントや畑といったものにも広げていきたい」としている。
また、今回の実証実験を公開した狛江市では、2022年5月に民間のドローン事業者と提携して、市職員のドローン教育を行っている。狛江市は市域のすべてが人口集中地区にあり、ドローン利用のハードルは高く、また、平坦な地形であることから土砂崩れといった災害の可能性は少ないが、1974年には多摩川の堤防が決壊して市内が浸水するなど、過去に水害に見舞われており、増水時の多摩川の状態把握をはじめ河川の堤防の外側のパトロールや大規模地震等の災害時の情報収集において、ドローンから得られる情報に大きな期待を寄せている。