
先端ロボティクス財団の理事長を務める野波健蔵氏は、2022年3月に2回目となる東京湾縦断プロジェクトを成功させた。これは、カイトプレーン型のドローンによる長距離飛行の実証を目的としたもので、その距離は約50kmに及んだ。今回、第8回国際ドローン展では各飛行距離に応じたカイトプレーンが展示されていた。
今回、国際ドローン展の主催である日本ドローンコンソーシアムの会長も兼任する野波氏に、カイトプレーンと長距離飛行の重要性について話を聞いた。
ドローンの第一人者ともいえる野波氏は千葉大学の理事・副学長(現 特別教授)を務め、2012年にミニサーベイヤーコンソーシアムを設立。その後、2013年に自律制御システム研究所(現 ACSL)を創業し、国産ドローンの開発とVisual SLAM(自己位置推定技術)をもとにした自律制御システムの開発に取り組み、その技術は退職後に開発された国産ドローンを代表するACSLの蒼天にも受け継がれている。そして、現在はドローンスクールの管理団体である日本ドローンコンソーシアムと先端ロボティクス財団の会長・理事長を兼任しており、ドローンの黎明期から安全な国産ドローンの開発に貢献してきたといえる。
野波氏は各地でドローン物流の実証実験が始まった2019年に、東京湾縦断プロジェクトを考案した。離島間や山間地域における短中距離のドローン物流は複数の企業が取り組んでいたため、50km以上の長距離物流の需要に注目したという。50km以上の飛行はバッテリー消費率の高いマルチコプターでの実現は難しく、通信や制御といった技術的な課題も多い。東京湾縦断プロジェクトはこれらの課題解決に取り組み、ドローン物流の新たな需要に結びつけるものだ。
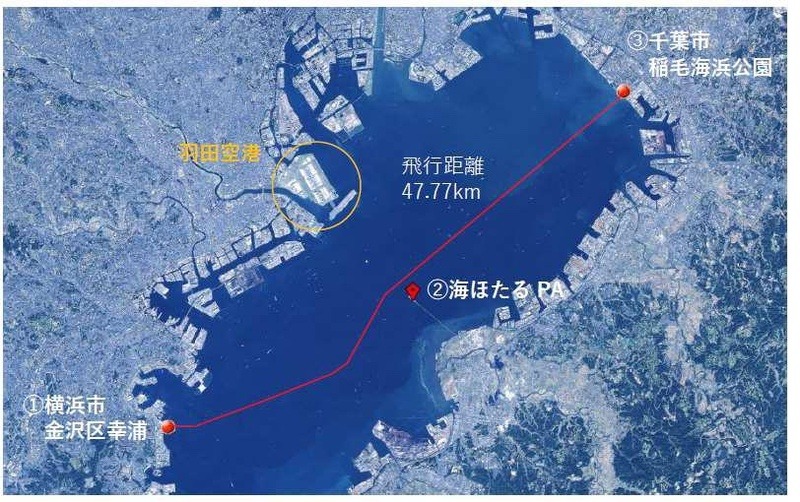
プロジェクトのルートは千葉県の稲毛海浜公園から神奈川県横浜市金沢区幸浦までの海上47.77km。中間地点には羽田空港や海ほたるPAがあるうえに、海上はLTEなどのモバイル通信は繋がらず、非常にリスクが高いルートといえる。


飛行距離50kmを実現するためには、最低でも70~80kmの距離を飛行可能な機体が求められる。そこで、野波氏が選定したのがカイトプレーン型のドローンだ。機体の上面には揚力を発生するカイトを備え、機体後部に垂直に取り付けられたプッシャーと呼ばれるひとつのプロペラで推進力を発生させて飛行するというものだ。当初は滑走路を必要とする構造だったが、2回目のプロジェクトに用いられた最新のものは垂直離着陸型に改良されている。
カイトプレーン型のドローンは、1992年に発生した雲仙普賢岳の噴火活動の調査にも用いられ、ドローンという言葉はなかったが、すでにこの頃から自律航行の技術はあったという。また、通信や機体制御の課題をクリアするために、オートパイロットや通信機器には冗長性を持たせ、通信機器はプロジェクトのために351MHzを利用した独自開発したものを採用している。羽田空港の周辺は5分に1度程の頻度で有人航空機の離着陸が行われており、高度100mを上限に飛行した。東京湾縦断プロジェクトは2021年6月と2022年3月の計2回実施しており、約50kmに成功している。
長距離におけるドローン物流のビジネス化と安全なドローン社会
各社が離島間や山間部、過疎地域でのドローンによる短中間距離の物流実証に取り組む中、長距離の物流に取り組むことについて野波氏は、「東京湾縦断プロジェクトでは、カイトプレーンに歯科技工物を載せ、千葉市から横浜市まで運ぶことを目的とした。ドローン物流のひとつの課題として採算性があるが、小さくて高価なものを手早く運ぶことでビジネスチャンスがありそうだ。今回の実証では、約50kmの片道を1時間で飛行することに成功した。今後は、さらに早く届けられるように50kmを30分で飛行させたい。陸送では実現できない速さで荷物を届けられれば、さらに需要を見出せるだろう」と話した。
さらに、野波氏に今後のドローン社会について進めていきたいことを伺うと、「2030年には、全国の同じ時間帯に20万機のドローンが飛行する可能性がある。というのも、近年は宅配個数が増加傾向にあり、その半分をドローンが担うと考えている。現在の宅配個数は約20万件あり、これを47都道府県で割れば、1都道府県につき4500機が飛行することになる。今では想像し難い世界ではあるが、2030年にはそのような社会になっているかもしれない。その時必要となるのが、ドローン同士の衝突回避システムだ。すでに画像認識を使って障害物を認識する技術はあるが、どのような回避行動を取るかという技術は開発されていないので、衝突回避システムの研究を進めていきたい」と話す。続けて「衝突回避を技術的に解決する以外に、ドローンの運用方法でも衝突を回避することが可能だ。自動車の事故は速度の異なる自動車が混在して走ることで発生するケースが多い。そこで、高速道路のように速度によって空域を変えれば、衝突リスクを削減することができる。例えば、地上から50mまでの高度は低速、50mから100mの高度は中速、100mから150mの高度は高速という具合に区分する仕組みを考えたい」とドローンが同じエリアで複数機飛行する場合の安全な運航について考えを話してくれた。
東京湾縦断プロジェクトで使用したカイトプレーンは、先端ロボティクス財団が受付窓口となって受注受付を開始している。