
KDDIと精密三次元地図の技術を持つアイサンテクノロジー、ドローン運航のKDDIスマートドローン、KDDI総合研究所、自動運転システムの技術を持つティアフォーの5社は、自動配送ロボット、自動運転車、ドローンの位置情報を連携させ協調して荷物を配送する実証実験に国内で初めて成功。12月6日に千葉県君津市で実験の様子を公開した。2030年をめどに協調配送の実社会での実現を目指す。
自動化するデバイスによって位置情報の取得方式が異なる
自動配送ロボット、自動運転車、ドローンはいずれも流通などでの省人化、買い物空白地帯解消など社会課題解決への寄与が期待されるシステムだが、動作する際の基本となる位置情報は要求される精度が異なることから、それぞれ違う方式が採用されている。
例えば、ロボットはセンチ単位の精度が要求されるために、センサーで自分の位置を探りながら移動する「ローカル座標系」と呼ばれる方式。自動運転車では、地図の緯度経度で位置を確認する「緯度経度座標系」に加え、周囲の映像を認識しながら進む「SLAM」と呼ばれる方式が採用されている。一方、ドローンはGPSなどの衛星電波で自分の位置を算出している「GNSS」方式だ。いわば、互いに「別の言語」を使っている状態。ロボット、自動運転車、ドローンを連携させるには、互いの位置情報を「翻訳」する必要がある。
KDDIとアイサンテクノロジーは、2021年に国立研究開発法人情報通信研究機構(NICT)から「ドローン・自動運転車協調制御プラットフォームの研究」を受託し、クラウドを介してロボット、自動運転車、ドローンの位置情報を「翻訳」し、協調させる研究を行ってきた。2023年3月には開発したクラウドシステム「協調制御プラットフォーム」を使って、同じGNSS方式の自動運転車の台車からドローンを離着陸させることに成功。同年9月には、GNSS方式のドローンとSLAM方式の自動運転車という別方式の組み合わせでの実験にも成功した。
効率の良い配送計画を自動で選定
今回公開された実証実験は、貨物に見立てたバッグを配送ロボットから自動運転車に受け渡し、さらにドローンに積み込んで目的地まで飛行するというもの。いずれも通信を介して「協調制御プラットフォーム」に繋がっており、まず、配送ロボットが店舗に見立てた建物内を出発、20メートル先の入り口に自動運転車と同時に到着し荷物が受け渡された。さらに自動運転車は約100メートル先にあるドローンまで走行。そこで荷物をドローンに積み込んで離陸。高度約100メートルを約3分間飛行して近くの空き地に到着して荷物をおろした後、再び出発地点に戻り着陸した。





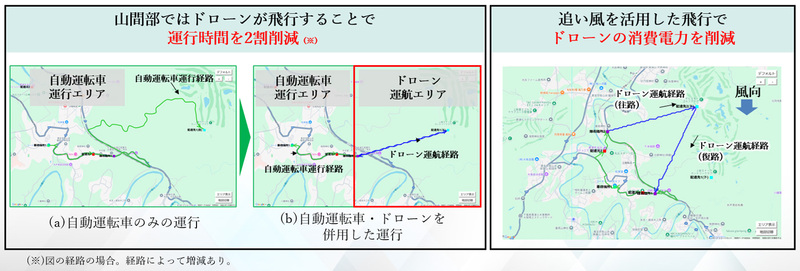
KDDIの技術担当者によると「協調制御プラットフォーム」にはそれぞれの運行管理機能や配送計算の機能があり、自動運転車とドローンの組み合わせで効率的な経路を選択して配送時間を削減したり、風力風向などの条件からドローンの飛行で電力消費のもっとも少ない経路を自動的に選択することが可能という。これによりドローンが離陸した後で自動運転車が最適な着陸地点にドローンを「迎えに行く」こともできるそうだ。実証実験では、こうした運用も見据え、自動運転車が牽引する台車からドローンが離着陸する様子も公開された。
ただ、今回の実験では、配送ロボットから自動運転車へ、また自動運転車からドローンへの荷物の受け渡しは人を介する形になっている。KDDIなどでは、今後、こうした荷物の受け渡しも無人化することを計画しており「2030年をめどに都市内や山間部など、それぞれの地域特性にあったやり方を組み合わせ、全自動の荷物配送サービスの社会実装を目指す」としている。