「視程の壁」は、人間と水中ドローンに共通する
デモの流れはこうだ。最初に、水中ドローンを潜らせて要救助者を見つける。次に、機体に装備したアームで要救助者を捕捉。その段階で潜水士が潜り、水中ドローンのケーブルを辿って要救助者を捕捉して救助する。

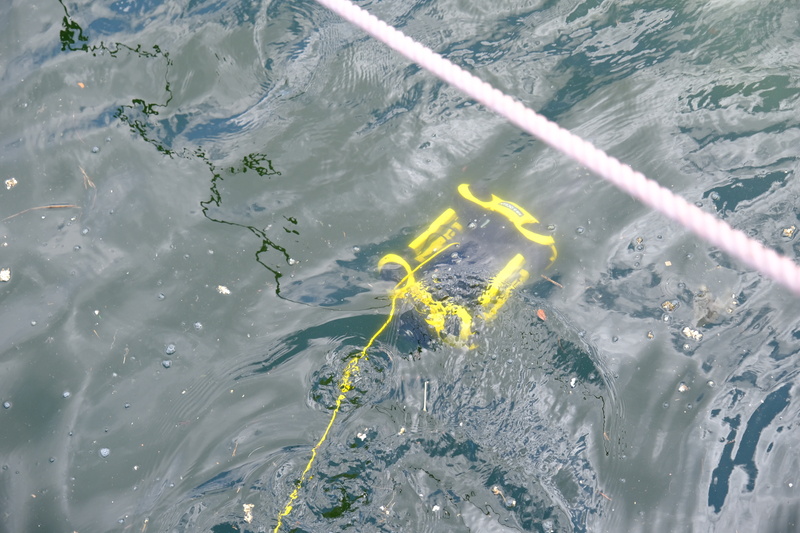
使用した機体はCHASING M2で、スペースワンの植木美佳氏が操縦し、補助者1名をつけた2名体制で運用した。CHASING M2は8枚のスラスターを機体の四隅に配置しており機動性が高い。上下、前後、真横にも移動できるほか、左右の旋回、前後左右360度のローリングも可能だ。映像は手元のタブレットで確認でき、当日は同じ映像を高輝度モニターへHDMI出力して、水中の状況および潜水士の作業状況を、本部でリアルタイムに把握できることを確認した。

水中ドローンを潜らせてから約20分。要救助者に見立てたコータローという名前の人形を捜索したが、発見に至らなかったため、潜水隊員4名が潜って捜索を行った。コータロー発見までの間には、潜水隊員が1名水中ではぐれてしまうハプニングもあり、そうした場合の対応手順は当然決まっているとはいえ一瞬ヒヤリとした。

問題は、水中の濁度。「視程15cmほどしかなかった」という。潜水隊員が手探りで要救助者を捜索して、コータローを救助した。
水中が濁ってしまった要因は、現場が沿岸部であり、海底には多くの泥などが堆積していたことが挙げられる。砂や泥は、ひとたび巻き上げてしまえば、潮流のない沿岸部では流されていくことがなく、再び海底に沈むまで水中は濁ったままだ。視程が悪いと作業に支障をきたすことと、着底しないで作業するスキルが求められることは、人間にも水中ドローンにも共通した課題であることが窺える。


隊員の安全性確保に水中ドローンは有用
今回のデモでは、実際に潜った隊員いわく「コータローを掴んだときも、自分の腕すら見えない状況だった。触った感じから、人形だと判断した」とのことで、水中ドローン運用には限界があることも浮き彫りになったが、それでも隊員の安全性確保においては有用性があることがわかった。
汚染や感染、低水温、深深度、夜間などの、安全性確保においてリスクの高い状況で、かつ捜索が長期化する場合には、積極的に活用したいと感じた隊員は多かったようだ。消防隊員が潜水する場合には、深度約10m程までを許可範囲としているそうだが、それより深い場所へも溺水や減圧症の心配をしないで運用できる点は、水中ドローンならではの活用メリットといえる。
デモの後に実施した水中ドローン操縦体験では、機能について熱心にメモを取る隊員の姿も見られた。政令指定都市に含まれないような地方自治体では、人口減少やコロナ禍による税収減少の影響もあり、数十万円程度でも新たな機材購入にはその有用性の証明がシビアに求められると聞くが、ロボットはそもそも万能ではない。導入にあたっては、人間とロボットの得意領域を棲み分けて不可能領域も見据えた上で、いかに協業させるかという視点での議論が重要だろう。今回のデモは、水難救助における水中ドローンの実用性と運用上の限界の両面をしっかりと検証できた好例ではないだろうか。