
ドローンのオープンソースソフトウェアArduPilot(アルジュパイロット)は、回転翼機、固定翼機、VTOL、ローバー(UGV)、ボート、水中ドローンなど、様々な形や大きさのロボット・ドローンに対応している。
ArduPilotは、GPLv3ライセンスを採用しており、機体制御システム構築のコストを削減できるほか、コンパニオンコンピュータなどを活用することで技術の機密性確保および特許出願も可能だ。

ArduPilot開発者コミュニティでは、常に世界トップクラスのエンジニアが技術の相談や議論を活発に行っている。3月に開催された開発者会議によると、非GPS環境下での飛行、衝突回避、セールボート、LuaScript活用などが、2020年の重点開発領域として挙げられた。
そのような中、日本におけるArduPilotをベースとするソフトウェアエンジニアの輩出と、オープンソースの国内コミュニティ構築を目指す「ドローンエンジニア養成塾」が、ArduPilotを活用した機体制御・管理の技術開発の成果を発表するデモイベントを開催した。ここで発表された12プロジェクトは、様々な社会課題のソリューションの種となる。本稿では、4つのカテゴリに分類し、取組内容を紹介する。
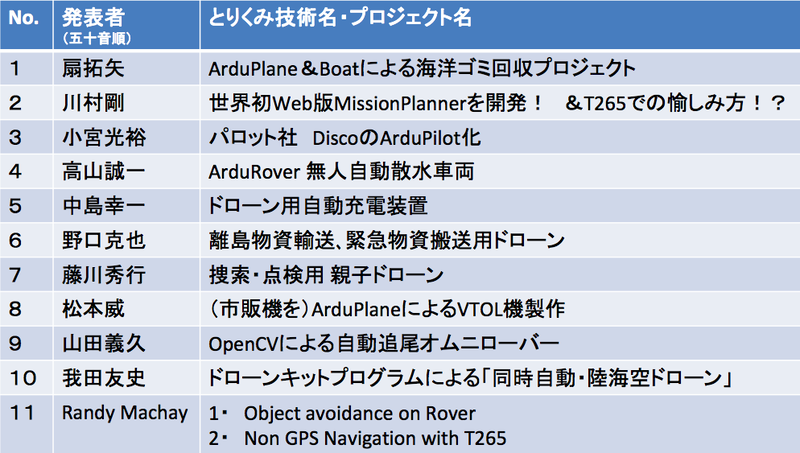
(1)機体制御
ドローンエンジニア養成塾の塾長であり、ArduPilotコア開発者のひとりであるランディ・マッケィ氏は、障害物回避と非GPS環境下における自己位置推定技術、2つのデモを行った。前者は、LiDARを用いたローバーの障害物回避、後者は、Intel RealSenseトラッキングカメラ T265を用いた非GPS環境下における自己位置推定だ。


ランディ氏いわく、「T265は人工物の検知が得意。人工物が少ない屋外にはあまり向いていない」とのこと。室内で行った実験の様子を動画で見せてくれた。
また、障害物回避技術については、デモで披露したLiDARのほか、Intel D435 Depth Cameraを用いた方法を鋭意開発中だという。これまでのLiDARによる2Dでの障害物回避から、3Dカメラの登場により3Dで奥行きの距離を計測する、上下に回避経路を取るなどが可能になる。
ランディ氏は、「カメラの進化はとても速く、把握できる距離も現状は10m程度だが、新しいバージョンでは15mに伸びるようだ。いずれ、T265とD435が合体したカメラも登場するのではないかと思う」と話し、ハードウェアとソフトウェアがともに進化し、ArduPilotによる機体制御が高度化していることを説明した。