(3)機体管理・運用
機体管理では、WEB版Mission Plannerが発表された。Mission Planner(ミッションプランナー)とは、地上局といわれるGCS(Ground Control System)。これをウェブインターフェースでやりとりできるようにした。
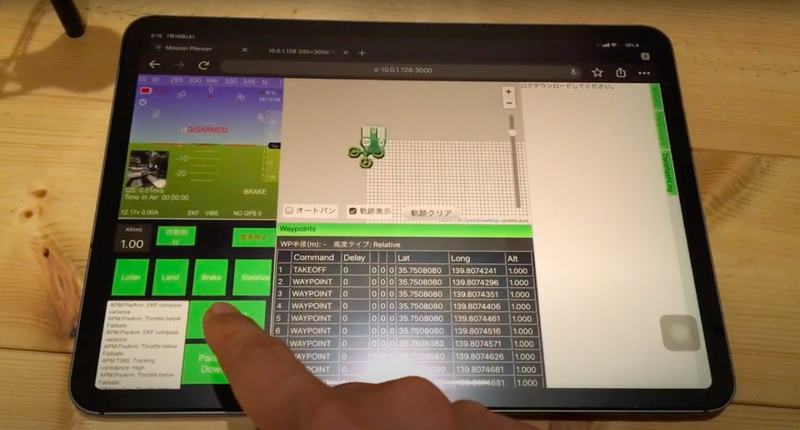
WEB版Mission Plannerなら、タブレットが1台あれば、パソコンを持っていかなくても現場で操作ができる。また、SIMが解禁されてドローンがネットに繋がるようになると、クラウド経由で遠隔地から複数台のデバイスで機体を管理・運用できるようになる。
機能は、地図の表示、ミッションのウェイポイントの表示、GoogleMapに室内Mapをオーバーレイできる機能も備えた。ミッションの読み書き、機体のパラメーター確認、フライト後のログのダウンロードもできる。

さらに、T265の映像をストリーミング・録画する機能も開発した。これは、ランディ氏も聞いたことがないそうで、「世界初」の試みだという。次の改良ポイントは、ストリーミング時の画像処理で、「CPUを効率的に使う」などの具体的な打ち手もすでに描かれていた。
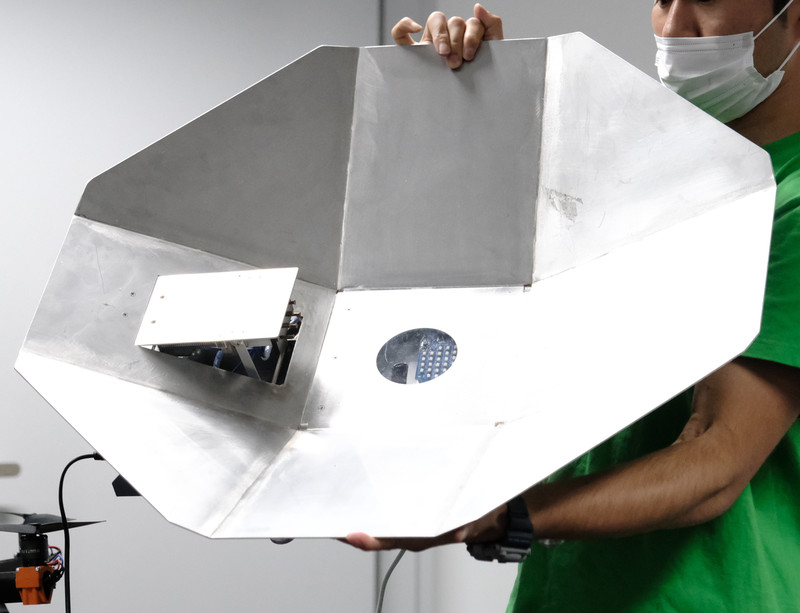
機体運用において役立つ、ドローン用充電装置も発表された。すり鉢状の自動充電装置で、ドローンが着陸すると下からのセンサーが働いて電極を出し、ドローン側の電極に接触して充電できるという仕組み。
機体が多少ずれても、傾斜に沿ってローラーで斜めに滑っていき、位置決めの装置を使うことなく、電極に位置が合うという、とてもシンプルな構造だ。
(4)複数機体によるミッション遂行
複数機体を組み合わせて、ミッションを遂行する試みも披露された。

ArduCopterに、マイクロドローンが乗って運ばれている。マイクロドローンは、狭所の点検や災害時の被災者発見など、幅広い用途が期待されているが、駆けつけだけでバッテリーを消費してしまうという課題がある。ArduCopterがマイクロドローンを適切な場所まで運び、ミッションを終えたら回収するという構想だ。マイクロドローンを回収する機構の装備や、長距離伝送の仕組みは、今後の課題だという。

テレメトリアンテナをコプターとローバーそれぞれに接続して常に位置情報を取得し、コプターが着陸すると、ローバーが自動的に発車して、コプターの着陸地点付近まで走行する仕組み。アンテナの代わりに、Wifiで通信できる仕組みを構築すれば、接続台数を飛躍的に増やせるという。
今回は、コプターの高度が5mまで下がったら、ローバーが発車し、コプターから半径いくつ以内の位置で止まる、という制御をDroneKitを使って行った。
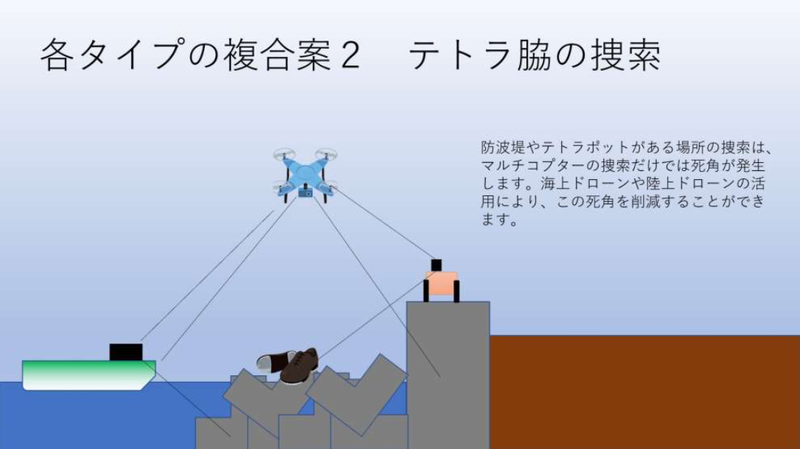
扇氏の「海洋ゴミ回収船」は、ArduPlaneと組み合わせたソリューション化を検討中とのことだ。まず、ArduPlaneでどこに海洋ゴミがあるかを探索し、その位置情報を頼りに船やローバーが現場に駆けつけてゴミ回収する。海ではゴミが少しずつ動くので、その動きをシミュレーターで検知することで、船が直接、回収現場へ向かうことを目指す。
ハードとソフトがともに進化
ランディ氏は、「ハードとソフトが両方一緒に進化している」とArduPilotの最新動向を伝えた。例えば、フライトコントローラーのメモリやCPUの性能が向上したおかげで、ArduPilot にLuaScriptをインテグレーションでき、それにより「歩くロボット」など細かな制御が可能になってきたという。有人機の位置情報を検知できるADS-Bを装備したり、ノイズが少なく温度の急変にも強いIMUを搭載するなど、フライトコントローラーの進化は目覚しい。
ランディ氏とともにドローンエンジニア養成塾を立ち上げた、ドローン・ジャパン春原氏は、「ArduPilotの魅力は、自律で動くとはどういうことかを、技術者が原理を理解しながら、自由にドローンソフトウェアの開発ができ、技術者がワクワクできることだ。世界中のワクワクした技術者が、新しい技術をどんどん開発している」と話した。今後は、陸海空のドローンによるトライアスロンイベントを企画中とのこと。ArduPilotによるどのような機体やソリューションが誕生するか、引き続き注視していきたい。