取材できる場所なら全国どこでも津々浦々、ユニークで面白いドローンを求めて幾千里。まずは、そんなわがままな連載を許可していただいた編集部に感謝しつつ、本連載「突撃! 全国高専・大学ドローン漫遊記」を始めましょう。今回、第1回目の取材先としてお邪魔させていただいたのは、早稲田大学の渡邉孝信教授率いる研究室です!
【今回の訪問先】
早稲田大学
先進理工学研究科 ナノ理工学専攻
基幹理工学研究科 電子物理システム学専攻
ナノ材料情報学研究
渡邉研究室
https://www.watanabe-lab.jp/

昆虫のように自在に飛行できる! 華麗なる羽ばたき飛行ロボット
実は、渡邉教授は総務省 戦略的情報通信研究開発推進事業(SCOPE)の平成30年度 独創的な人向け特別枠「異能vation」プログラムにおいて「破壊的な挑戦部門」に選出された大変ユニークな研究をしている先生です。異能というので、ちょっとマッドサイエンティスト!? のようなイメージを勝手に描いてドキドキしていたのですが、ご本人は至って朗らかで、親しみのある研究者でした。

渡邉教授は、これまで数多くの先進的な研究を行ってきましたが、ドローンジャーナルが突撃取材したのは「垂直離着陸型羽ばたき飛行ロボットの自律飛行制御」に関するテーマです。この羽ばたき飛行ロボットは「WiFly」と名付けられ、10年ぐらい前から研究がはじまりました。まずは、昆虫のようにホバリングや急旋回など高度な飛行ができる、華麗なる羽ばたきを動画で見ていただきましょう。
パタパタと音を立てながら空を飛んで滑空し、昆虫のように自在に飛行していることが分かるでしょう。すでに世界では、鳥型や昆虫型などの空飛ぶドローン(ロボット)が多くの研究者によって開発されています。しかし、この羽ばたき飛行ロボットの開発背景とロボット機構を知ると、他のドローンとは一味も二味も違っていることが理解できます。
「エナジー・ハーベスティング」に代わるアプローチとして、センサ・ノードに移動する手段を持たせる
さて、この羽ばたき飛行ドローンの開発背景ですが、いま、ちまたではIoTやDXという言葉が飛び交っています。近未来的なイメージとしては、モノのインターネットによるIoTにより、身の回りのあらゆるモノがネットワークに接続され、「砂粒大の無数のセンサ・ノードが私たちの日常生活を埋め尽くす」といった想像が膨らむかもしれません。
以前から渡邉教授は、IoTによって取得された膨大な情報を活用して「現実空間とサイバー空間が真に融合した世界を実現したい」という思いがありました。これはDXやCPS(サイバーフィジカルシステム)、デジタルツインといった先端キーワードとも直結するものです。そこで、まず自由にどこでも飛んで情報を集められる「羽ばたき型ドローン」を開発しようと考えましたが、こういったIoTシステムには常に電源の問題が大きな壁として立ちはだかっています。
無数にあるセンサ・ノードをいちいち充電していられないため、最近では熱や振動、電波など、環境中の微小なエネルギーを電気に変えて活用する「エナジー・ハーベスティング」という研究が世界で進められています。これは言葉の通り「エネルギーを自ら収穫する(作り出す)」という技術です。しかし、まだ本研究の実用化への道程は、もう少し先になりそうです。
「そこで別の代替アプローチとして、センサ・ノード自身が移動手段を持ち、欲しいデータがある所まで行って帰ってくるようなシステムを考えてみてはどうか、と思いついたのです。こうすれば無線通信の電力を削減できるし、基地局で充電を繰り返して長期間の動作も可能になります」と、渡邉教授は開発のきっかけを振り返ります。
では、どんな移動手段を具備すれば良いのでしょうか? 一番自由な移動手段といえば、もちろん飛行でしょう。ただし、いま一世を風靡しているマルチコプター型ドローンは、常にプロペラを回し続ける必要があり、航続距離にも限界があります。また何かのトラブルで墜落するリスクがあり、安全面も課題の1つになっています。
そこで渡邉教授がひらめいたのが、トンボのようにホバリングも滑空飛行もできる小型・軽量の機体です。これならば、いまのドローンが抱える問題も解決できると考えて、羽ばたき型ドローンの開発を決意したそうです。
バッテリを利用した重心移動機構と、滑空飛行による低諸費電力化
羽ばたき型ドローン・WiFlyを開発するまでに、渡邉研究室では多くの試作を行い、同時にソフトウェアの工夫も凝らしました。最初の機体は、有名な超小型飛行体研究所・宗像俊龍氏の知見をお借りし、その飛行体をベースに開発していったそうです。
ただしメカについては、その後も改良を加え続け、独自開発の重心移動とクランク機構のアイデアを盛り込みました。この重心移動技術は特許を申請中です。また飛行を安定させるために、AIによる先進的な制御を行っています。
WiFlyは、機体の中で最も重いリチウムポリバッテリをサーボモータで移動させ、全体の重心を変えることで、ホバリング飛行から水平飛行まで、空中姿勢を機敏に変えられる点が大きな特徴になっています。
この機構により、空中に垂直に飛び立ったのち、ホバリングしながら姿勢を変化させて水平飛行に移行したり、再びホバリング飛行に移って、垂直姿勢で着陸したりすることができるわけです。
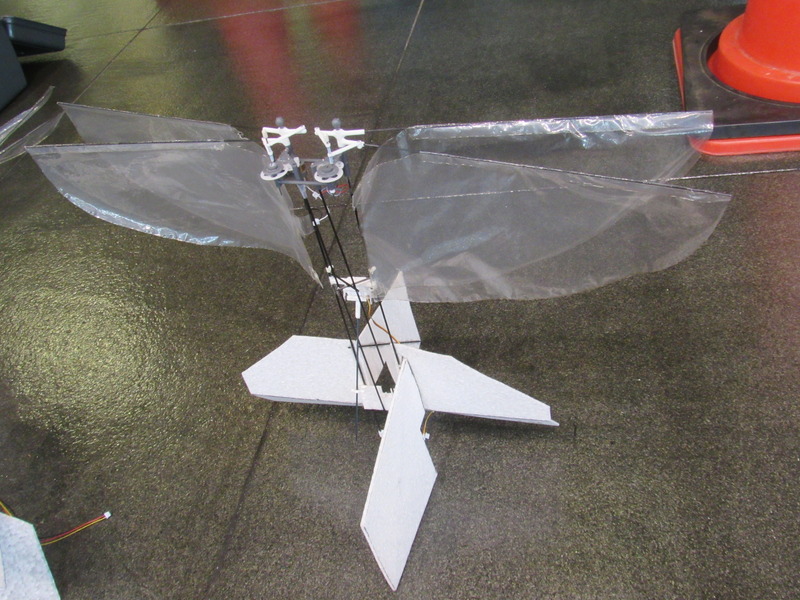
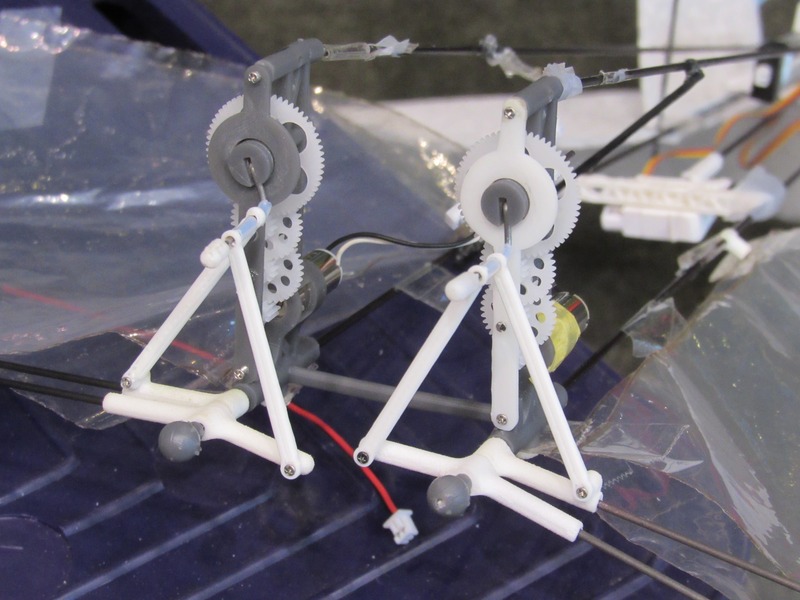
「飛行のメカニズムは、市販の玩具にも採用されているオーソドックスなXウィング型です。上下二枚の翼を打ち合わせ、翼の後縁から後方に気流を押し出して推進していく仕組みです。空中での機体の姿勢を変化させる重心移動機構は、このドローンの中で一番重いバッテリをスライダーで移動させることで実現しています」と説明するのは、修士課程1年の笹崎舜翔さんです。
通常、飛行機の姿勢は翼のフラップを動かして制御します。これは機体の周りの気流を変化させるために、推進中でなければ機能しません。しかし重心移動機構であれば、ホバリング飛行で空中に静止した状態でも、姿勢を変化させられます。これもWiFlyの機構の大きなメリットといえるでしょう。
渡邉教授も「もう1つのメリットは、高速回転するプロペラを使わないため安全性が高いことです。また機体が約40~50g(カメラ搭載時)と軽量なので、たとえ墜落しても安全性にも問題はありません。羽ばたき型ドローンは、翼の動きを止めてグライダーのように滑空飛行できるようになるため(現在は前傾姿勢で飛行)、常にプロペラを回し続けるマルチコプター型よりも消費電力が少なく、将来的に航続距離を稼ぎやすくなるという側面もあります」と説明します。
とはいえ、機体のペイロードが小さく、荷物などの搬送には不向きというデメリットもあるとのこと。ただ本来の目的であるIoTの情報収集という意味では、物流を目的にしていないため、特に問題はないでしょう。搭載バッテリ容量には制限があるため、現在は10~15分ほどの飛行時間ですが、さらに延ばせるようにチャレンジしていくそうです。
可能な限り機体を軽量化。最新機種はカメラも搭載し、念願の目が付いた!
WiFlyは羽ばたき型なので、一般的なドローンよりも飛行が難しいようにも思われます。そのあたりのご苦労についても、前出の笹崎さんに聞いてみました。
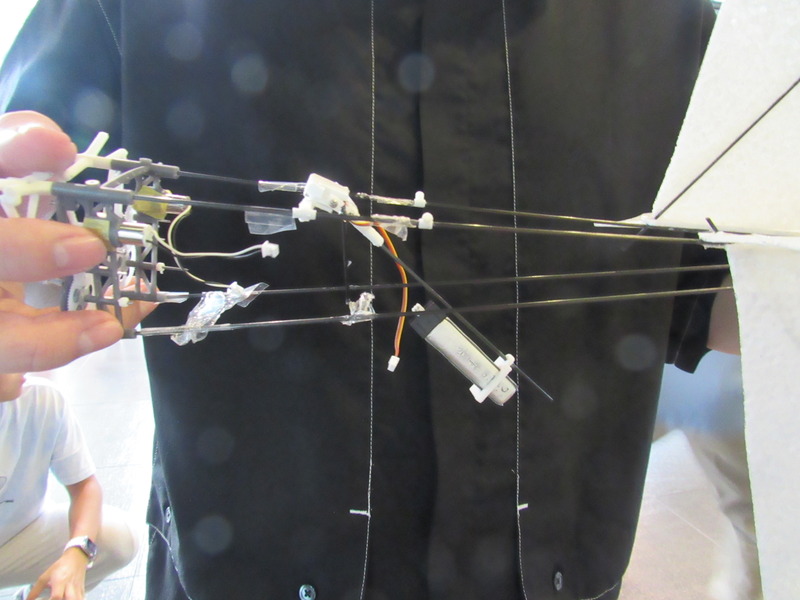
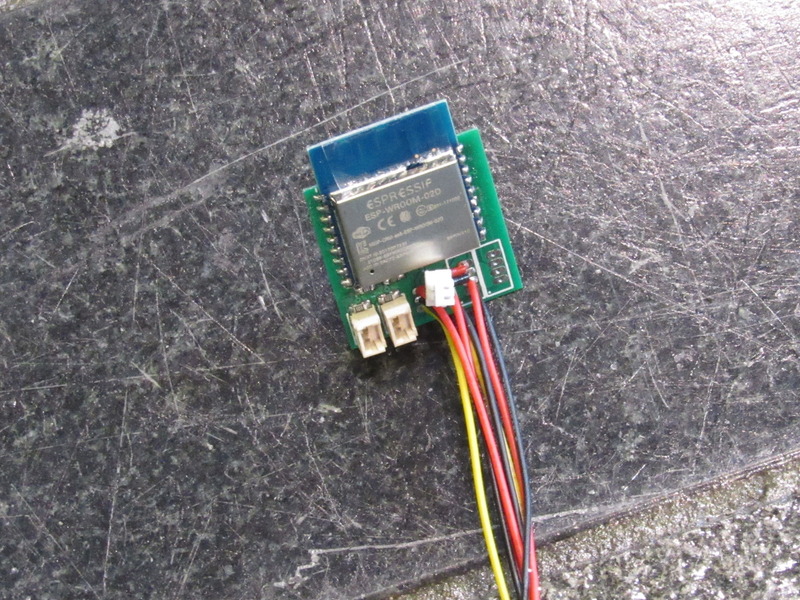
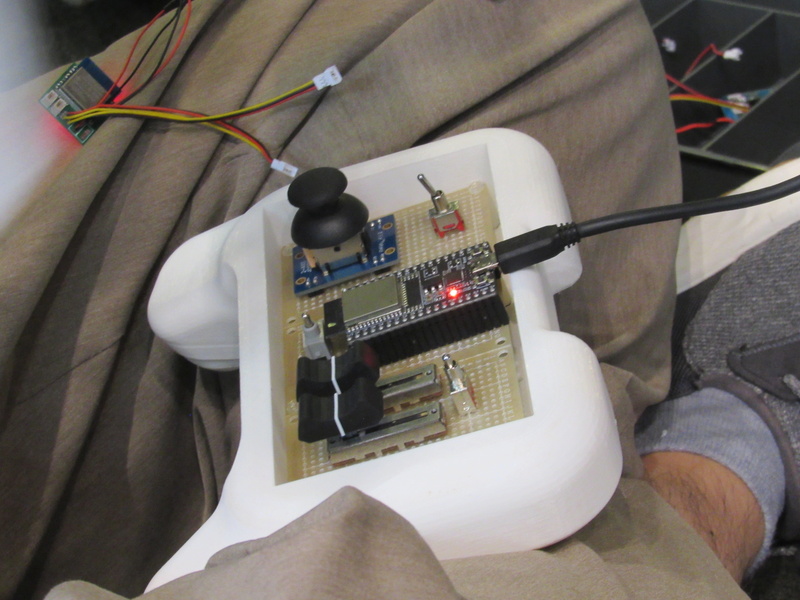
まず機体を軽くするために、機械部品も電子部品も可能な限り小型なものを選定したそうです。たとえば羽を駆動させるDCブラシレスモータは、アマゾンで小型のものを探してセットで購入。制御や通信を司る電子基板には、2.5GHzのWi-Fi通信が可能な小型マイコンボードを使用しています。

「最新のWiFly2は両翼独立機構を採用し、左右の羽をコントロールできるようにしています。羽は小型DCモータをPWM制御で256段階で可変駆動させますが、回転が速すぎるため3段ギアをかませて12rpmぐらいに落としてから、クランク機構で最大120度まで羽を開くようにしています。ギアボックスは研究室の3Dプリンターで何度も試行錯誤しながら製作しました」(笹崎さん)。
羽が独立機構になったため、やはり操縦は以前よりも難しくなったそうです。左右の羽ばたき翼の振動数や、重心の位置、フラップの向きなど、自由度が大きいぶん、それなりに飛行にも熟練の技が必要になります。個人差はあるものの、上手く飛ばせるようになるために、研究室のメンバ-が毎日訓練を積んでいるとのことです。
ただしホバリング飛行を続けると、ある時点から急に電池の消耗が激しくなり、パラメータが変化して操縦が難しくなる現象も起きます。安定した飛行で航続時間や距離を延ばすには、可能な限り前傾姿勢で水平飛行を維持する工夫も求められます。そこでホバリング姿勢から水平飛行へ移行する場合に、最適なタイミングで移行できるようにプログラムで自動化しています。
さらに深層強化学習を駆使し、前出の重心移動の制御にも取り組んでいます。安定した水平飛行を維持できるように飛行データをWi-Fi経由でフィードバックし、適切な前傾姿勢を保てる方法を学習させているのです。
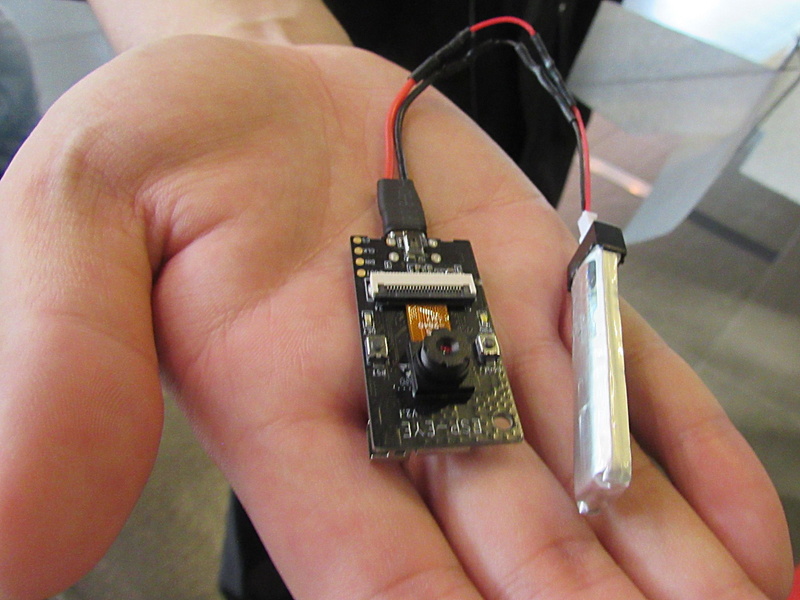
また昨年の大きな成果としては、機体に小型カメラを載せられるようになったことです。わずか12gのマイクロカメラモジュールを秋葉原の秋月電子通商で探し、ドローンに組み込むことに成功しました。この店舗は、筆者も数十年前の学生時代に大変お世話になった懐かしい電子部品屋さんでした。
さらに将来的な拡張性も考えて、機体にはカメラ以外にも3軸加速度センサ、高度計、磁場センサを備えています。当面の目標としては、カメラ機能を備えたので、映像から赤い球を把握しながら追尾していく研究を進めているそうです。また将来的にはVisual SLAM(Simultaneous Localization and Mapping)にも挑戦したいという話でした。
最大で4機までのスウォーム・センシング飛行にもトライ! 将来は完全自律制御を目指す
実は今回、筆者がWiFlyを取材したいと思ったのは、もう1つの理由がありました。トンボや蜂、鳥、魚のような自然界の生物に当てはまることですが、ドローンが群を為して飛んだり、泳いだりする「スウォーム制御」(群制御)の研究を渡邉教授が進めているからです。将来的に羽ばたき飛行ドローンの自律編隊飛行を実現しようとしているわけです。このスウォーム飛行について、ご興味のある方は別記事でも紹介しているので参考にしてください。
渡邉教授がスウォーム飛行を研究しているのは、前出のように「現実空間とサイバー空間が真に融合した世界を実現したい」との思いからです。従来のようにIoTセンサをばらまいて情報を収集すると電源の問題が起きます。しかしセンサ・ノード自身が移動手段を持ち、欲しいデータがある所まで行って帰ってくる羽ばたき型ドローンのシステムであれば、基地局で充電を繰り返して長期間の動作が可能になります。ただ、それを実現するには高度なロボットの通信技術や制御技術が必要になります。たとえば、スウォーム飛行では複数のドローンがメッシュネットワークなどで機体間通信を行いながら飛行しています。
「現在、最大4機のドローンを同時に飛ばしていますが、まだスウォーム飛行と呼べるような実験の水準には至っていません。まずは1つの機体の空中での位置や姿勢を確実に制御できるようにする必要があります。機体数が増えると、やはり通信帯域の問題や混線の恐れがあるため、究極的には無線通信を使わない完全自律制御を目指したいと考えています」と渡邊教授は説明します。
今後の研究の展開や開発については、最新の羽ばたき飛行ドローンにカメラという強力なツールを搭載できるようになったため、AIで周辺環境を認識し、リアルタイムで障害物を回避するなど、自動操縦技術を磨き、さらなる機械的な改良も続けていくそうです。
渡邉教授は「ドローンの機構部もモータとギアボックスでなく、人工筋肉を使いたいですね。将来的に生物の筋肉のような出力で、伸縮比や応答速度を実現できるアクチュエータが登場したら、トンボのような小型の飛翔体になるかもしれません」と、夢のある未来の展望も示してくれました。これからの展開がとても楽しみな研究でした。