センシンロボティクスはドローンやUGV(無人搬送車)、IoTセンサーなどを通じて各種データを収集し、社会インフラの点検や巡視、現場の施工管理といったものをDX化する取り組みを行っている。
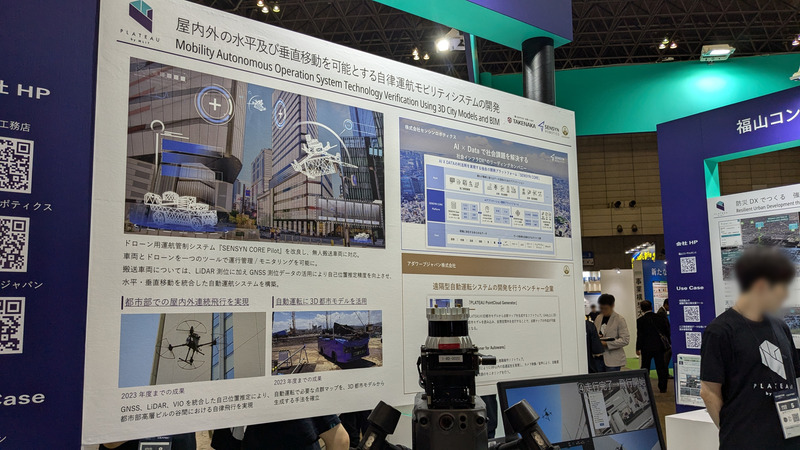
CEATEC 2024で同社は、協業する建設大手の竹中工務店、遠隔自動運転システムを開発するベンチャー企業のアダワープジャパンとともに取り組んでいる「屋内外の水平及び垂直移動を可能とする自律運航モビリティシステムの開発」に関する研究成果を、国土交通省都市局のブースで紹介した。
ドローンとロボットの運航管制をひとつに統合
センシンロボティクスはドローン用の運航管制システム「SENSYN CORE Pilot」を開発する。産業向けドローンの運航管制では、主にDJI FlightHub 2が活用されているが、ドローンの専門外の人には使い方が難しいという課題があった。一方でSENSYN CORE Pilotでは3Dマップを見ながら自動飛行ルートを作成するといった、直感的な操作ができるシステムとして作られている点が強みだ。今回の取り組みの中でSENSYN CORE Pilotに改良を施し、UGVの運用にも対応できるようにした。これにより、ドローンもUGVも同じソフトウェアで一括して運用を管理できるようになる。

空を飛ぶドローンと同じように、地上を走るUGVも運行ルートが作成できるのだろうか。担当者はUGV独特の課題として、車体の大きさや重量による細かな制御指示を想定しなくてはいけないことをあげた。具体的な対処方法は回答を避けたが、ウェイポイントを置けば、UGVがそれに沿ってカーブするという単純な仕組みではないようだ。いずれにせよ、運航管制システムが水平移動するUGVや垂直移動するドローンにおいて、安全かつ効率的な運用のカギになるのは確かだといえる。
デジタルツインによる3D都市モデルの活用
「屋内外の水平及び垂直移動を可能とする自律運航モビリティシステムの開発」は2022年度から3か年で行われている。2023年度までの成果として紹介されていたのが「都市部での屋内外連続飛行を実現」と「自動運転に3D都市モデルを活用」だ。これらには国土交通省が推進する「Project PLATEAU」で制作された3D都市モデルが活用されている。
国土交通省では様々なプレイヤーと協力し、日本全国の都市の3D都市モデル、いわゆるデジタルツインを作るProject PLATEAUを展開中。国際標準CityGML 2.0に準拠し、オープンデータ化された3D都市モデル標準製品仕様を製作しており、順次公開中。2027年度には500都市以上のデータが準備される予定だ。3D都市モデルのユースケース開発も進められており、今回紹介するセンシンロボティクスらの研究も「建築・都市DXの推進に向けたユースケース開発業務」のひとつで、国土交通省都市局のブースで展示されたのもこのためだ。
都市部での屋内外連続飛行ではGNSS(全球測位衛星システム)から得られる衛星情報の活用、LiDAR(レーザー光)による測定、カメラ画像の変化を捉えてドローンの移動量を算出するVIO技術の使用により、ドローンの自己位置測定を行った。このうちLiDARで自己位置測定を行う場合は、事前に点群マップの作成が必須で、従来は点群データ取得のために手動でドローンを飛行させる必要があった。また取得する点群データもクオリティにばらつきがあるといった課題があり、LiDARを活用する飛行はハードルが高かった。そこで点群マップを3D都市モデルで作成し事前の飛行を代替できないか検討された。
実際に大阪府堺市というビルが林立する都市部で実証飛行を行ったところ、LiDARと3D都市データで作成した点群マップを活用して問題なく飛行できた。またGNSS、VIOを組み合わせることで、自己位置推定が低下する課題も解決できる見通しがついた。担当者は「都市部での実証実験では複数回飛行させ、すべての飛行を自律飛行で成功させました。都市部ではProject PLATEAUで製作したオープンソースの3D都市データがあるので、これらを活用して事前に点群マップを作ればコストカットにつながり、都市部でのLiDARを活用した飛行がもっと進められると考えます」と自信を示した。自動運転に3D都市モデルを活用するケースでも同様で、自動運転でLiDARを使用する場合も、点群マップが必要。3D都市モデルから点群マップを作成した。
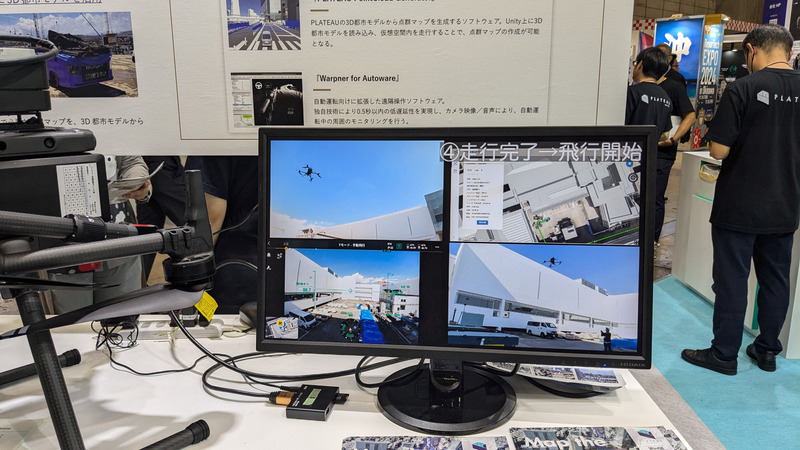
ブースではUGVが目的地へ自動運転で向かい、UGVに搭載されたドローンが離陸して自律運航する様子を捉えた映像も上映されていた。ドローンが人の手を介することなく目的地まで運ばれ、自律飛行で目的を達成できるようになれば、これほど頼もしいことはない。まだ実証段階のようだが、完全無人化による業務遂行の実現は、確実に進んでいると感じさせた。