長野県で建設、燃料、食糧事業を展開するヤマサと信州大学工学部、松本工業高等学校は産学連携により、食糧倉庫に侵入したネズミを撃退する次世代鳥獣被害対策ソリューションの開発プロジェクト「いたずらネズミとお手伝いドローン」(略称:いたドロプロジェクト)を立ち上げ、2022年9月29日に記者発表会を実施した。
3者の得意技術で構築される「いたずらネズミとお手伝いドローンプロジェクト」

いたずらネズミとお手伝いドローンプロジェクトは、食糧倉庫におけるネズミの食害やペストコントロールといった被害への対策を目的としたもので、AIとドローンを使ってネズミを威嚇し、被害の低減・抑制を目指す。
同ソリューションは、参画する企業及び学校が得意とする技術を連携させながら開発を進めていく。ヤマサは食糧工場内に設置したカメラの画像データからネズミを検知するAI解析技術を提供し、信州大学は倉庫内3Dマップの作成及び検知したネズミの位置までのルートの最適化技術、松本工業高校がネズミを威嚇するドローンの無線操縦と運用を実施する。

1870年(明治3年)創業の老舗企業であるヤマサは、食糧事業を主とした地域密着型の事業を行っている。代表取締役社長の北爪寛孝氏は、プロジェクトを始めたきっかけについて「昔からお米にはネズミがつきもの。ネズミの農作物への被害については、食糧工場においてペストコントロールといった衛生的な問題と、原料、設備や機材などに対する損害という経済的側面を持つ。現状のネズミ対策について調べたところ、薬剤や罠といった旧来的な手法での対処しかできていないということがわかった。近年、社内のDXに力を入れており、デジタル推進課を設立し、AI事業などを積極的に行っていることから、デジタル技術を活用した解決方法を模索していた」という。続けて「倉庫というロケーションでペストコントロール対策である生物的対策を取り入れ、ドローンをネズミの天敵に見立てることにより、効果的な環境的対策を行う。新しいソリューションを開発するため、県内の教育機関と協力体制を構築することになった」と話した。
それぞれの専門技術を生かしたソリューション開発(AIによる動体物体検知技術の開発)
ヤマサ取締役総務部長の依田剛氏は、プロジェクトの成果目標を「信州大学・松本工業高校とヤマサの3者が得意とする専門技術の相互接続および一連の機能として稼働させること」と挙げ、さらに「ソリューションの知財化・商用化および鳥獣被害対策として社会実装」を目指すという。
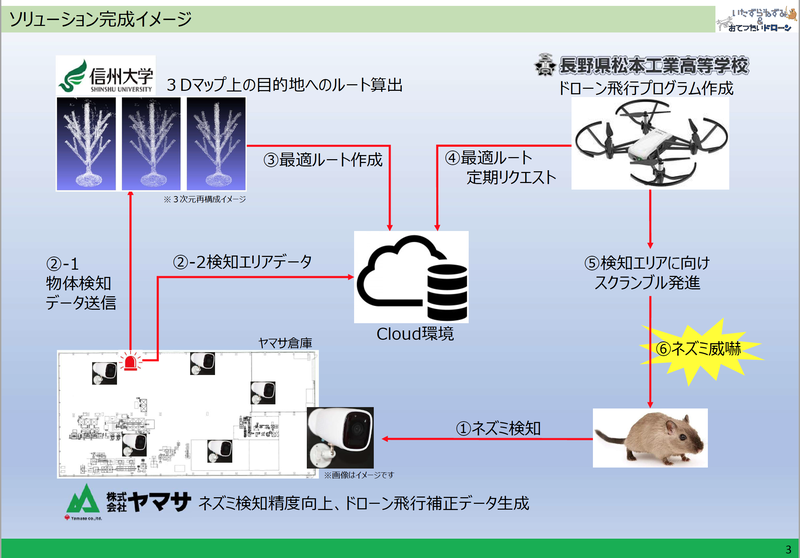
具体的には、ヤマサが設置した倉庫内のカメラでネズミを感知し、そのデータをAIに学習させることで教師データを作成する。その後、信州大学によって工場内をデジタルデータ化した3Dマップを使い、感知したネズミの位置を特定することで、ネズミの場所へ向かうドローンの最適な飛行ルートが作成できる。そして、松本工業高校は、その飛行ルートを使い、ドローン自動飛行プログラムを作成。命令を受けたドローンはスクランブル発進し、ネズミを威嚇したのちに元の位置に帰還するというフローになっている。
北爪社長は、現在の取り組みについて「ネズミ個体の映り込みが少なく、誤検知が多い。もしネズミが多く、困っているところがあれば教師データ作成のためご協力いただきたい」と話す。また、将来的にはクマなどのネズミ以外の鳥獣被害対策への転用を考えているという。依田氏は「地域の安全・安心な社会を創造し、産学が連携することにより地域の人材育成やDX推進に貢献したい」と話した。
信州大学による3Dマップ作成とドローン飛行ルートの最適化技術
信州大学 工学部 機械システム工学科の設計工学研究室では、ものづくりと地球環境および人間との“調和”を実現する「最適化」の技術と、まだ存在しない“未来”を計画し創造する「設計」の技術をコンセプトに、再生可能なエネルギーの利用や3次元再構成、モデルベース開発などの研究を行っている。中村正行教授は「3次元再構成や歩行ロボットの最適歩容・歩行経路の生成などの研究成果が本プロジェクトで活用できる」という。
例えば、ネズミをAIで検知して位置を特定し、ドローンを向かわせるためには3次元の空間データが必要になる。工場の構造物を3次元の空間データとして取得するため、撮影した動画をもとに線状立体構造物の3次元再構成(SfMによる点群データの生成)を行い、3Dマップを作成する。また、ネズミが出没した際、いち早くドローンが向かうためには、最も効率的な飛行経路を導き出す必要がある。そのため「ドローンの運動方程式を立てる必要がある。段差を回避した経路の生成といった、歩行ロボットの最適歩容・歩行経路の生成研究で得た最適経路生成アルゴリズムをドローンに応用することで、飛行経路の最適値が導出できる」という。中村教授は「3Dマップの生成と最適飛行経路の導出が、プロジェクトにおける研究室の役割」だと話す。
中村教授は、長野県教育委員会が推進している高等学校学びの改革事業に携わった経験から、プロジェクトの参加を松本工業高校に呼びかけたという。現在、研究開発担当者として、大学院生と4年生の2人が取り組んでおり、この軌道をもとに工業高校の在学生が自動飛行のための制御プログラムの作成を行う。このような産学連携の取り組みは「学術成果の社会実装および学生の実践の場であり、高校生のキャリア教育や高大接続改革につながる」とプロジェクトの意義について話した。
電子工学部によるドローン飛行のデモンストレーション
長野県松本工業高等学校 電子工学部の部員数は約100名おり、40年以上の歴史を持つ部活動となっている。うな重を成層圏まで打ち上げるプロジェクトなど、授業の一環として企業コラボレーションも行い数々の研究やイベントに携わってきたという。本プロジェクトではAIや最適飛行ルートの情報をもとに、ドローンの自動飛行プログラムを開発し、ネズミの追い払いを目的とした運用・制御を担当する。
三澤実教諭は、プロジェクト参加への経緯を「学校で学んだことをものづくりで応用する機会が少なく、学びを深める絶好の機会だ」と考えたという。活動を進める中で「飛行制御プログラムは、問題や課題が多く、ものづくりの難しさを感じている。しかし、生徒にとって実際に大学や企業と共同で製品開発に携われる意味は大きい。今後は課題を解決しながら実証に取り組んでいきたい」と語った。
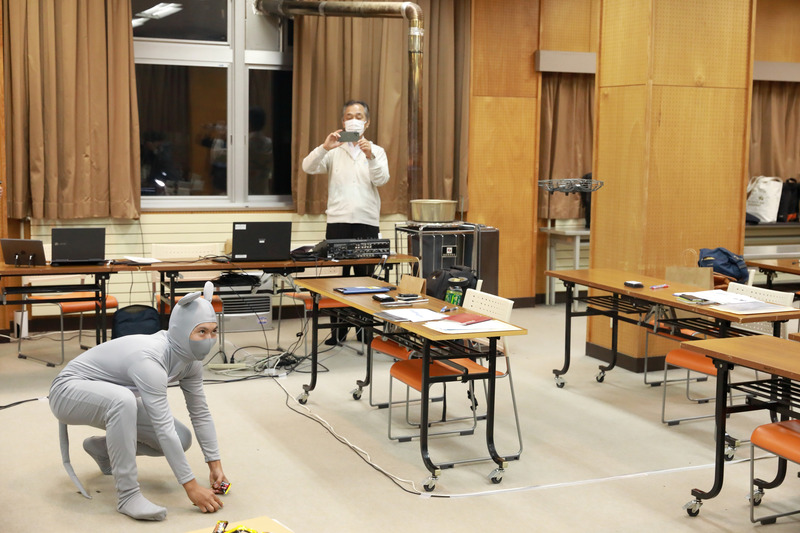
発表会では、自動飛行によるドローンのデモンストレーションが行われた。産学連携による次世代鳥獣被害対策ソリューション開発プロジェクトは、2023年5月の完成を目指している。