12月5日改正航空法が施行され、第三者上空を補助者なしで目視外飛行させる「レベル4飛行」が解禁された。これによってドローンの運用範囲が拡大し、物流配送などへの活用は新たなフェーズに入る。一方、懸念されているのが運用や機体の安全性だ。
国土交通省によると、昨年度におけるドローンの事故やトラブルは139件報告されている。今後のレベル4飛行に伴う事故やトラブルの増加を防ぐために、機体の認証制度や操縦ライセンス制度、運航ルールなど新制度を設けたが、人や建物が多い都市部上空等を飛行させる場合には、衝突回避システムや墜落に備えた安全機能が求められる。
▼国土交通省「令和3年度 無人航空機に係る事故等の一覧」
https://www.mlit.go.jp/koku/koku_tk10_ua_houkoku.html
今回、TEAD、パナソニック システムデザイン、日本化薬の3社はパラシュートシステムをドローンに搭載し、墜落時の運用面と安全性を確認する実証実験を実施した。
遠隔目視外飛行時に異常が発生、遠隔からパラシュートシステムを展開
パラシュートシステムを搭載する総重量11kgのドローンは、TEADが実証実験用に開発。日本化薬の産業用ドローン向け緊急パラシュートシステム「PARASAFE CA12-01」(最大離陸重量25kg)を搭載し、パナソニック システムデザインが開発した遠隔制御システムを使って実証実験は行われた。

今回は神奈川県に遠隔制御の拠点を設け、福岡県のドローンを遠隔で制御するというもの。福岡県の運用担当者たちの作業は、離着陸場にドローンを運ぶだけであり、ほぼ無人の運用を想定している。なお、ドローンの映像伝送や飛行制御にはNTTドコモの「LTE上空利用プラン」を利用した。

11月15日の実証のシナリオは、高度30mを飛行中にバッテリー異常が発生したことを想定して行われた。異常が確認されると、神奈川県の遠隔制御システム上にアラート画面が表示され、遠隔から手動でパラシュートシステムを点火し、安全にドローンを着陸させるというもの。なお、着陸地点は飛行中に遠隔制御システムで演算予測を行い、おおよその着陸範囲が分かる仕組みだ。

神奈川県から離陸ボタンが押されていよいよ実証スタート。
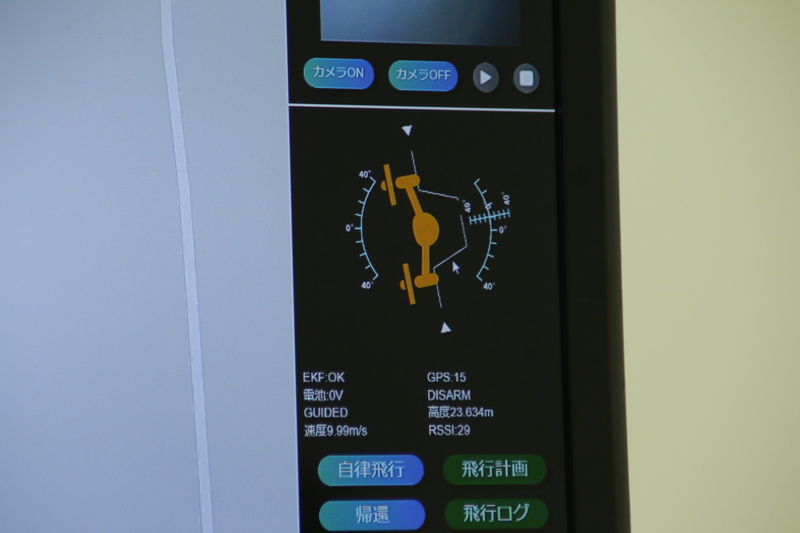
離陸したドローンは高度30mで数分間飛行し続けていたが、異常が発生すると遠隔制御システムに「警報」の文字がアラート音とともに表示された。すると、地上を撮影したドローンのカメラ映像が映し出され、ドローンを着陸させる想定場所(無風を想定し、半径10m以内)がマップに示された。

この時、遠隔地のオペレーターは着陸場所の安全を撮影画像から確認し、安全が確保できていない場合はドローンを遠隔操縦し、安全な場所に移動させることができる。そして、着陸場所の安全を確認後、パラシュートの点火ボタンが押され、ドローンのプロペラが自動で停止し、ドローンに取り付けられたパラシュートシステムが展開された。


しかし、よく見るとドローンの姿勢状況を表す計器が傾斜を示しており、ドローンに搭載したカメラ映像も上空を映し出している。数分後、現場からパラシュートシステムは点火したが、展開し終える前にドローンが墜落してしまったことが報告された。墜落したドローンはバッテリーのほか、アーム、ランディングスキッドが大きく破損し、実証の続行は不可能となってしまった。今回の結果を受けて、3社はフライトログデータなどの解析と検証を行い、改めて実証実験を行うこととなった。
原因探求と経験を活かした2度目のチャレンジ
PARASAFEはドローンに取り付けた紐を切断しないように、展開前にプロペラを自動で停止させる機能が搭載されている。そのため、遠隔から点火指示が発信されるとプロペラを停止し、パラシュートを展開させるまでのタイムラグが発生する。このプロペラ停止から点火までの時間は事前に環境や機体に合わせて設計することが必要であり、遠隔システムの指令を受けてプロペラ停止からパラシュートが開くまでに1回目はドローン停止後2.3秒と計測された。なお、今回飛行した高度30mは、PARASAFEが機能する最低展開高度となっており、展開までの時間の余裕は少ない。だからといって余裕を持たせて高高度で展開させてしまうと、風に煽られてどこに着陸するか分からず危険が及ぶおそれがある。
展開タイミングがプロペラ停止後2.3秒と計測された1度目の結果を解析すると、高度30mから落下し、地上から5mの地点でパラシュートが展開していたことが分かった。そこから逆算すると、プロペラが停止してからシステム全体で指令からプロペラを停止してパラシュートが展開されるまでの伝達/処理時間を含めて0.5秒で点火しなければ間に合わないことが判明した。
3社は1回目の結果を踏まえ、再び実証実験を実施。
2回目は福岡県で群馬県のドローンを遠隔飛行させる形で行われ、使用機材やシナリオは1回目と同様だ。同じように離陸を開始し、警告アラートが表示されるとオペレーターがパラシュートの点火指示を遠隔から行う。すると今度はパラシュートが見事に展開し、ドローンは水平を維持しながら横風(当日の風速は3m/s)に煽られながらも想定した着陸地点の範囲内にゆっくり着陸した。風に煽られて着陸時に衝撃を受けたことで、プロペラとランディングスキッドが一部破損してしまったが、PARASAFEのおかげで最小限の損害に抑えることができたといえる。


レベル4飛行でパラシュートシステムを運用するための課題
今回は1回目に失敗してしまったが、こういった失敗が今後の製品開発に活かされていくことは間違いない。失敗した知見やデータを蓄積し、成功に結び付けるというとても素晴らしい実証実験になったのではないだろうか。
遠隔でのパラシュート運用を成功させることができたが、運用課題はまだ残されているという。パラシュートの点火は、LTE回線を通じて遠隔制御システムからの指示をドローンに搭載したコンパニオンコンピュータへ送ることでパラシュートのトリガーデバイスに信号が届き、トリガーデバイスがパラシュートシステムを点火するという過程を経る。
パナソニック システムデザインの担当者は「ドローンに搭載したカメラの映像共有は、0.5秒の遅延が発生している。今回の実証では、異常発生からドローンをすぐさま停止させることはなく、ホバリングして安全な地点を確認してから着陸するという運用だった。もし、緊急性が高い異常が発生した場合、遠隔から制御コマンドを受け取るのに1秒かかる想定なので、映像の遅延と合わせて1.5秒のロスが発生してしまう計算となり、それが遠隔制御の制約となってしまうのが問題だ。さらに言えば、緊急時には人が判断する時間や異常が発生してから点火ボタンを押すまでの時間も命取りになってしまうので将来は自動化を念頭に開発を進めていきたい」と話した。
日本化薬の担当者は「今回実施した遠隔目視外飛行での運用は初の試みとなった。PARASAFEの開発時にさまざまな環境でテストを行ってきたが、遠隔制御となると遅延を踏まえた運用が必要だと分かった。現在、機体センサーからの異常情報をもとに自動でパラシュートを展開するシステムを開発中であるが、特に遠隔運用に効果的だと感じた」と話した。
TEADの担当者は「今後もさまざまな機体、風速、高度で実証を行い、ブラッシュアップを図っていく予定だ。将来は弊社の開発機体に留まらず、パナソニック システムデザインの遠隔制御システム、日本化薬のパラシュートシステムをパッケージ化し他社開発の機体にも実装することで、安全なドローン運用の普及につなげていきたい」という。
航空法の枠組みでは、レベル4飛行を行うために一等無人航空機操縦士の国家資格と一種機体・型式認証の取得が義務付けられている。機体認証においては安全を確保する機能や装備について具体的に示されておらず、どういった機能を搭載すれば安全を担保できるか国、メーカー共に手探り状態となっている。今回のパラシュートシステムもひとつの手段であり、安全を担保するうえで欠かせない機能だと認められれば標準化される可能性もある。レベル4飛行の実現は、いかに安全性を確保できるかにかかっているだろう。