ドローンの産業利用は建築分野でも進んでいる。とりわけドローンに期待されている用途が、建築中の建物の内部を飛行して現場を撮影し、工事進捗の管理に使おうというものだ。ただし、こうした屋内でドローンを飛行させる場合に問題となるのが、GNSSの電波を使った飛行ができないことだ。
一般的にドローンはカーナビゲーションなどと同じように、GNSSの衛星から発せられる電波を受けて、機体の位置を把握しながら飛行する。しかし、建物の中では衛星からの電波を受信できない。そこで屋内で飛行するドローンを安定させるため、機体のカメラで建物内に設置した二次元マーカーを認識させたり、機体に搭載したLiDARを使って三次元地図を作るといった方法が採られる。しかし、工事の進捗にともなって日々刻々と環境が変化する現場にマーカーを設置することは難しく、また、ドローンにLiDARを搭載する場合は機体が大型化してしまうため、狭い建築現場で飛行させるのが難しいといった課題がある。
Visual SLAMは時間経過とともに実空間とズレが発生

こうした課題に対して竹中工務店は、カナモト、アクティオとともに、ドローンの自動飛行にBIMを用いた屋内外自律飛行の実証試験を行い自律飛行に必要な精度確保の有効性を確認した。これはドローンに搭載したステレオカメラによるVisual SLAM技術とBIMを用いて、GNSSの電波が入らない建物内でもドローンを安定的に飛行させる技術である。
これまでにもVisual SLAM技術を使ってGNSSの電波が入らない屋内空間でドローンを飛行させる取り組みは、ドローンメーカーやソリューションプロバイダの手によって行われてきた。しかし、Visual SLAMはドローンが飛行する10分程度の時間、周辺環境を取得していると、少しずつ実際の環境との誤差“ドリフト”が発生。この実際の環境とVisual SLAMによって得た三次元空間との誤差によって、ドローンが指定した位置からずれることとなる。
そこで竹中工務店、カナモト、アクティオの屋内外自律飛行システム「BIM×Drone(ビムクロスドローン)」では、この三次元空間の地図としてBIMデータを利用し、Visual SLAMのデータと突合して補正することで、より正確なドローンの飛行を実現している。
GCSの画面上に表示された3Dモデル上で航路を描く
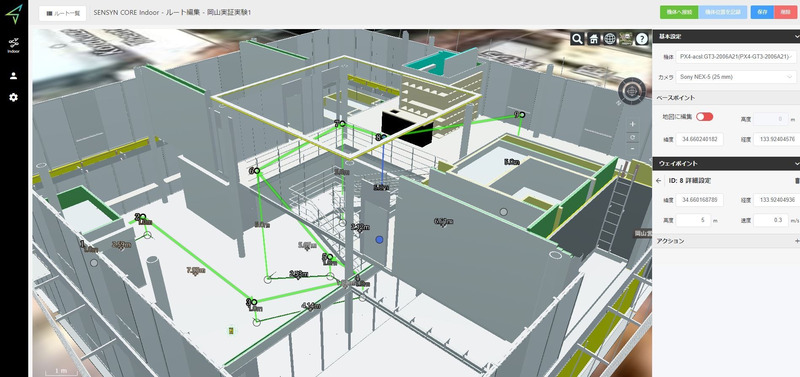
事前にVisual SLAMで飛行させて取得したデータとBIMのデータを組み合わせることで、最大で±5センチメートルというレベルの誤差の飛行を実現。また「BIM×Drone」で用いる機体は、Visual SLAMが苦手とする20~30ルクスといった低照度下での安定した飛行も可能にしている。
この、ドローンの飛行にBIMのデータを用いることは、飛行の精度を向上させるだけではない。Visual SLAMはドローンがリアルタイムに三次元空間を把握するための技術ではあるが、空間の立体地図を得るためには一度Visual SLAMでデータを取得する必要がある。しかし「BIM×Drone」では、利用するソフトウェア「センシンコア」上でBIMの3Dモデルが配置、簡単なUI操作で、一度も飛行したことがない空間で、航路を設計することができるのである。
この「BIM×Drone」を使えば、オフィスビルやマンション、商業施設などの大規模な建設現場において、現場管理の作業者が日々巡回して記録するような作業を、ドローンに代替させることが可能になる。さらに、大規模な倉庫や大型商業施設において、夜間、ドローンを巡回させて、撮影した映像をリアルタイムに警備担当者のもとに送信したり、警備の記録として残す活用方法も考えられる。
ガラスの間仕切りや狭隘な空間も安定して飛行

竹中工務店ではこの屋内外自律飛行システムを使った実証実験を2021年7月に、同社の建設現場で実施した。階段のある吹き抜け空間で結ばれた2つのフロアにおいて、BIMデータ上で飛行経路を設計したドローンが飛行。その空間にはVisual SLAMが苦手とするガラスを使った仕切りや、ドローンが通過する空間の幅がわずか1.5mあまりという場所もある環境で、指示した経路を安定して飛行しており、これまで難しいとされてきた屋内の自動飛行が実現した。
このセンシンロボティクスの「センシンコア」を使った屋内外自律飛行システム「BIM×Drone」は、2022年春に竹中工務店、カナモト、アクティオから展開される予定だ。来春以降、日々の作業を終えた大規模な建設現場で、自動でドローンが屋内外を飛行し、定期的に進捗管理や巡回、点検業務を行うさまが見られることになるかもしれない。