1965年、宇宙船マリナー4号による初の火星着陸から約50年が経つ。それでもなお、解明に至っていない ”火星の謎” は多い。例えば、かつては水が存在していた説や地底湖が存在する説、生命の生存に必要な環境要素の存在といった、あらゆる可能性が火星には秘められており、その先には人類の惑星移住や宇宙ビジネスなど、SF映画さながらの夢が広がっている。
これまで火星探査には周回機、着陸機、探査車などが役立てられてきたが、宇宙航空研究開発機構(JAXA)では新たにドローンを使った火星探査技術の研究に取り組んでいる。火星環境に対応したドローンの開発について、JAXA宇宙科学研究所 准教授 大山聖氏に話を伺った。
ドローンの飛行が難しい火星の大気環境
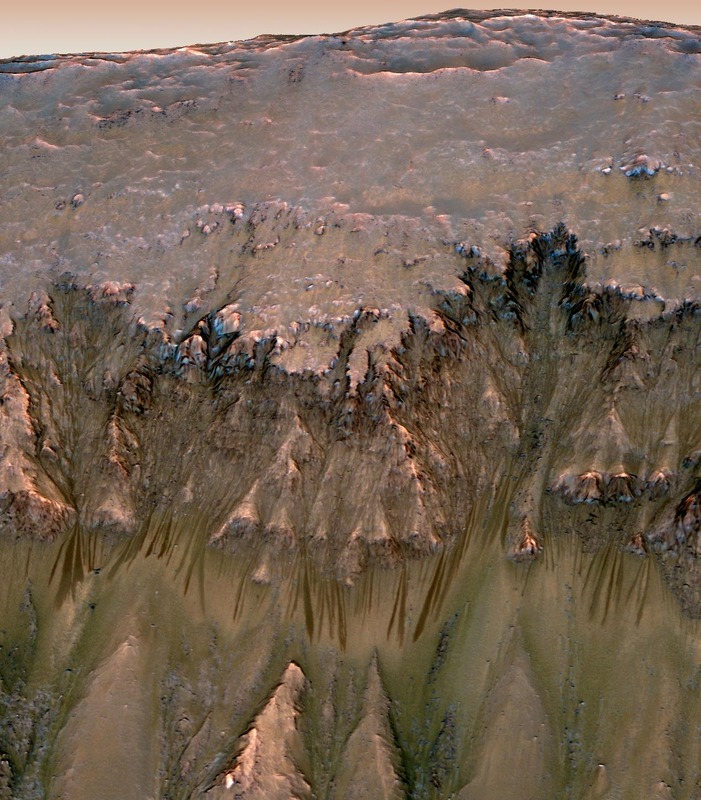
2011年にアメリカ航空宇宙局(NASA)は、火星のクレーターで複数の黒い筋模様(Recurring Slope Lineae)を発見した。これは、水が存在しないとされてきた火星において、液体の水が染み出している可能性を示す大きな発見となった。また、火星には地球同様に四季が存在する。この黒い筋模様は春夏に現れ、秋冬には消えることが分かっている。そして、JAXAの研究者らはこれを調査することが可能な火星探査用飛行機(固定翼機)の開発に着手し、火星と同じ大気環境となる高度36km地点において、今年中に飛行実験を実施する予定だ。このようにJAXAは、数年にわたって飛行機による探査技術を構築しており、2016年からはドローンの研究も並行して進めているという。
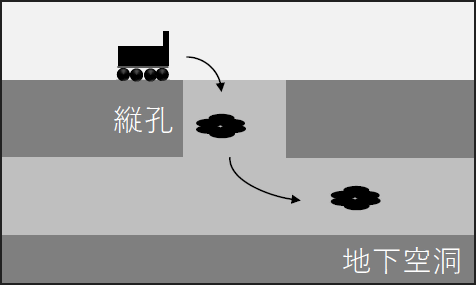
ドローンの研究に着手した発端は縦穴空洞の発見だ。近年、火星では直径100~300mの穴が多数見つかっており、これは火山活動が活発だった頃にできた溶岩洞の天井が崩落してできた穴だと言われている。この穴は溶岩洞(地下空洞)につながり、縦穴の奥はトンネル状になっている可能性が高いとされる。地表面の探査とは異なり、縦穴空洞の内部を探査するためには離着陸やホバリングが可能なマルチコプターが適していると考え、ドローンの研究開発が始まったという。
地球と大きく異なる環境下、火星の飛行環境とは
火星の環境は重力が地球の約3分の1、大気密度は約100分の1と、プロペラで揚力を稼ぐドローンにとって非常に過酷な環境となる。さらには、大気の主成分は二酸化炭素で平均気温は氷点下63度であり、夜間は氷点下80度を下回るという。もちろん、磁気方位計は使えず、GNSSの受信もできない。地球と大きく環境が異なる火星でのドローンの飛行について、大山氏は「揚力と重力が釣り合ってはじめてドローンは飛ぶことが可能になる。重力は3分の1と効率的に働くが、大気密度が100分の1になると、揚力も100分の1となってしまう。計算すると低重力ではあるが、揚力が下がることで地球環境よりも33倍不効率な状態ということが分かった。火星用探査ドローンは揚力を増やすことと、質量を減らすことが必須と言える」という。また、高い揚力を生み出し、軽量なプロペラに加え、「火星特有の低レイノルズ数・高マッハな環境下で、空力に優れた高性能なブレードを設計しなければならない」ともっとも重要視している研究開発課題に触れた。
ドローンとローバーが連携、JAXAが想定する運用方法!
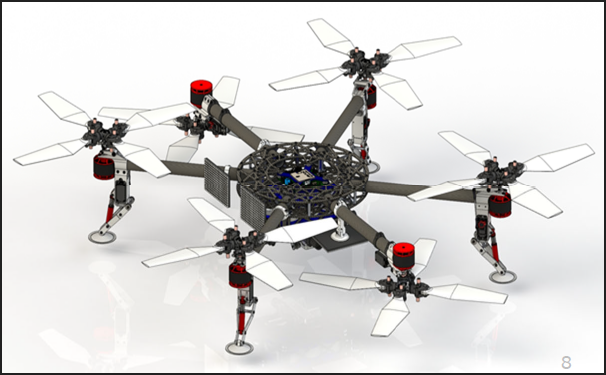
ドローンの研究はJAXAをはじめ、東京都立大学、工学院大学と進めており、その形状はヘキサコプター型で、1つのモーターに対して4枚のプロペラを備えている。また、下向きに装着した中央のプロペラはサイドのプロペラとオーバーラップさせた構造だ。4枚のプロペラは翼面積を増やし、揚力の増加につながる。屋内環境に近い空洞内を探査し、ローバーに搭載して縦穴の近辺まで運ばなければならないという制約から、プロペラをオーバーラップさせ、コンパクトな機体設計を目指す。現在想定しているドローンは、ローバーに搭載した状態で縦穴の近くまで運ばれ、ローバーから縦孔に向けて離陸するといったもので、縦穴空洞はおおよそ、100~200mの深さがあり、航続距離は1km程度が理想となる。現在はシミュレーションと減圧チャンバーを使った実験による研究を重ね、機体の開発はこれから着手していく予定だという。
軽量化を図るうえでは、産業ドローン同様に材質にカーボンを使用。重量を削減できるパーツは、大きく分けてプロペラとバッテリーの2つとなるが、プロペラは剛性とのバランスが必要で、バッテリーの軽量・小型化は次世代バッテリーに期待するほかない。
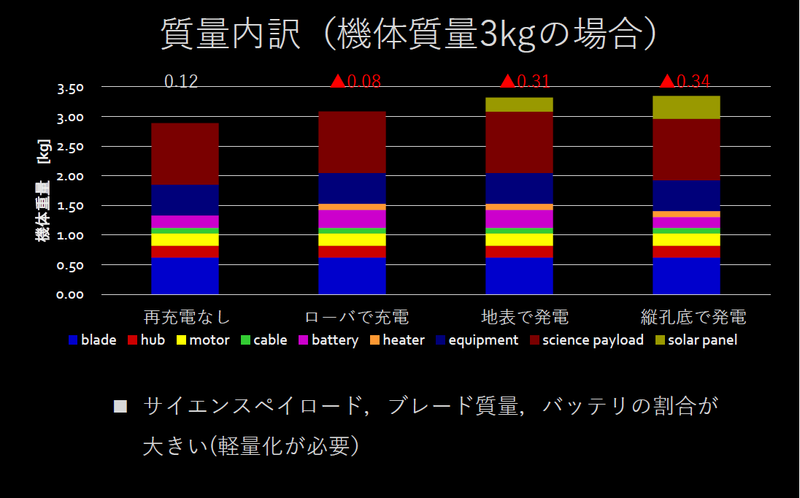
JAXAはドローンの運用方法から適切な機体重量を分析。機体重量3kg、5kg、8kgの3種類を想定し、以下の運用方法を考案した。
1. ローバーから離陸し、1度の飛行でドローンは使い捨てとする。
2. ローバーから離陸し、バッテリーが少なくなるとローバーに戻って自動充電を行う。
3. ドローンにソーラーパネルを搭載し、地表に戻って充電を行う。
4. ドローンにソーラーパネルを搭載し、縦穴空洞の内部で充電を行いながら飛行する。
検討した結果、ソーラーパネルは重量増加につながり、火星の太陽光に適したソーラーパネルを新たに開発しなければならない。一方、使い捨てのドローンでは、丹念な調査に支障がでる。そして、4案の中からローバーに戻って充電する方法が最も適していると結論付けられた。
重量はローバーに戻る時間を考慮し、飛行時間を稼ぐために軽量な3kgを想定。その結果、1m×1mのサイズで1kgのペイロードを確保したドローンの研究に取り組んでいる。
4つの技術課題がハードルとなる火星探査用ドローン
飛行性能はプロペラの構造や軽量化といった工夫で対策できるが、地球上のドローンと異なる課題はほかにもあげられる。
まず1つ目がドローンの制御で、地球上から火星のドローンを操縦すると、数分の遅延が生じてしまう。そのため、ドローンの自律飛行が欠かせず、設定した飛行ルートに沿って自律的に飛行する機能が必要だ。なお、火星の運用ではローバーをドローンの基地と考え、ローバーとドローン間での通信制御を想定しているという。
2つ目は縦穴空洞内の自律飛行だ。直径100~300mの空洞内を自律飛行するためには、ドローンが自動で内部構造を把握する必要がある。空洞内の環境は屋内施設と同じく、産業ドローンで用いているビジュアルSLAMの搭載で解決できる可能性が高いという。
3つ目は氷点下60~80度におよぶ極めて低い気温の対策だ。これによる障害はプロペラの結露が考えられるが、高高度で運用する気象観測用ドローンなどでは電気ヒーターによる結露対策がとられており、ドローン本体の対策は電気ヒーターやヒートパイプで解決可能だ。しかし、大山氏はアビオニクスやサーボモータなどの搭載機器の故障がひとつの課題だという。これに加え、モーターの発熱も懸念点のひとつだと大山氏は考えている。揚力を増やすために通常のドローン以上にモーターを高速で回す必要があり、それに伴ってモーターの発熱が考えられる。対流冷却がほとんどない火星において、どのように冷却するかが1つの課題となっている。
4つ目はプラネタリープロテクション技術の開発だ。地球の生命体を惑星に持ち込むことは、惑星の汚染つながってしまう。そのため、ドローンを滅菌し、あらゆる菌から保護することが求められる。
JAXAは飛行性能のほか、これら4つの課題を念頭に研究を進めており、今後は火星探査にドローンや火星探査用飛行機を役立てていく。これらの調査について大山氏は「クレーターの崖にみられる複数の黒い筋模様の解明や地層の調査など、新たな発見があるかもしれない。さらに、壁面に生える苔などが発見されれば、生命の存在が立証される。空洞内の壁面を観察するだけでも、とても夢のある調査になりそうだ。また、ドローンの活用は火星そのものの調査のほかに、有人探査の基地として縦穴空洞内が使えるかどうかを調べることにもつながる。残念ながら現状では火星探査のスケジュールめどは立っていないが、依頼が来た時に迅速にドローンで対応できるように開発を進めていきたい」と話した。