2025年3月19日、JFEスチールは、鋼製配管上を吸着走行しながら減肉点検を行う点検ロボットである無線式「Scan-WALKER」(以下、無線式)を開発したことを発表した。既存の有線式「Scan-WALKER」(以下、有線式)を改良したもので、今回製鉄所内の点検作業に試験導入し、遠隔操作による点検範囲の拡大と高所作業の負荷低減を実現した。
製鉄所では、製造工程で使用するガス等を輸送するため、長距離にわたり配管を高架上に敷設しており、配管に腐食減肉が生じると内容物が漏えいするため、減肉の点検やメンテナンスを定期的に実施している。
これまで点検作業では、作業者が仮設足場の上で超音波板厚計や有線式を使っていたが、点検範囲が限られ、高所の狭い空間での作業に伴う安全性の確保が課題となっていた。
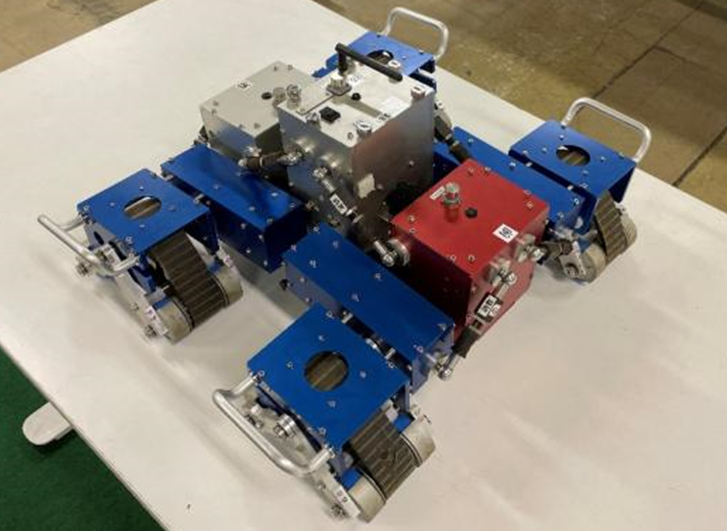
新たに開発した無線式では、小型かつ低消費電力で点検が可能な永久磁石を使用した磁化渦流センサー(※1)を採用。また、ロボットの機体にリンク機構(※2)を用いており、配管径にならい、4輪の永久磁石を内蔵したクローラーにより鋼製配管面に吸着しながら周方向および軸方向に移動する。作業者は、ロボットが走行している配管上の位置とその減肉の有無をリアルタイムで生成される点検カラーマップで確認することができる。
今回、各製鉄所内において、無線式ロボットを用いて地上からの遠隔操作による検証試験を実施し、局所的な減肉を発見した。今後JFEスチールは実運用を進め、配管以外の構造物にも展開する方針だ。
※1 点検する対象面に電圧を加えることで、その反応から局所的な肉厚変化を検出するセンサー。
※2 複数のリンク(部材)とジョイント(関節)で構成された機械的な構造。
