2022年11月18日、東京大学 生産技術研究所の横田裕輔准教授、横浜国立大学の平川嘉昭准教授、スペースエンターテインメントラボラトリーは、⾶⾏艇型ドローン(以下UAV)搭載用の海底通信装置を開発し、海面に着水したUAVによる深海底観測に成功したことを発表した。高速・高効率・リアルタイムの海底情報の取得が可能となり、深海底情報の取得速度というボトルネックが解消されることが期待される。
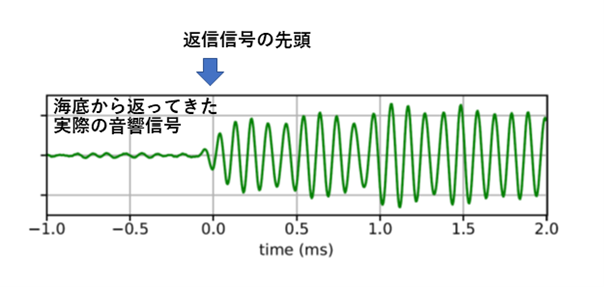
開発研究ではUAV搭載用の海底通信装置の小型化および軽量化を図り、さらに自律制御により海面離着水ができるUAVに対し、海底観測のための海面制御を可能とした。これにより、相模湾において水深約1,300mの海底に設置された海底音響基準局(受信した音響信号をそのままの形で返信する海底機器)との通信および測距を実現した。
実験に用いたUAVは、スペースエンターテインメントラボラトリーが新たに開発した飛行艇型UAV「HAMADORI 6000」試作モデル。翼幅6m、巡行飛行速度は110km/h。30m程度の離水距離により、ある程度ひらけた海洋上であれば離着水ができる。製品モデルとして最大8時間、400海里(約740km)の飛行を目指し、開発を進めているという。今回の実験で搭載した観測機器(ペイロード)の総重量は6kgと、一般的な海底観測装置に比べて大幅に軽量化している。

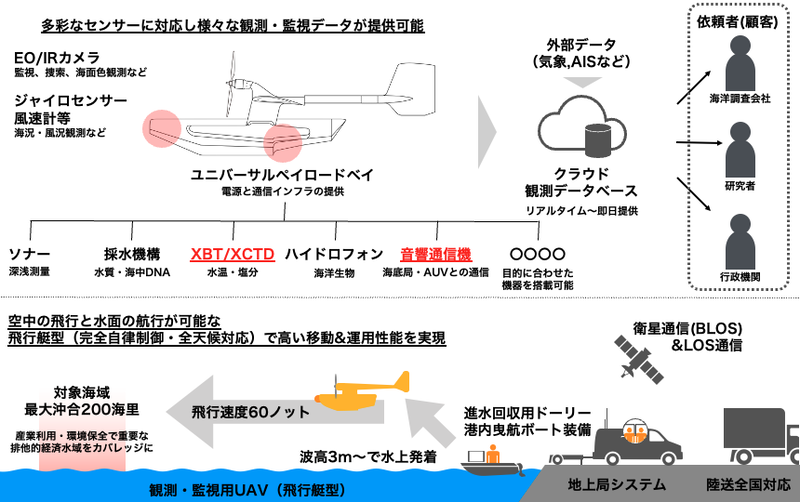
深海底との長距離を音響で通信するには、安定した環境において音響信号を発信しなければならない。UAVに装着した音響装置は海中の浅い部分にあるため、機体の動揺や波浪による泡の影響で音響通信が不安定になることがある。実験期間の相模湾は、最大風速約8m、最高波高約1.5mの環境であったが、機体の速度や姿勢をコントロールすることで海面航走を安定させ、音響通信を実施することができた。

この機体により水深5,000m程度までの深海底との通信や観測が可能となる見通しであり、日本周辺の非常に広い範囲の海洋底が観測対象となることが期待される。
今後は実運用に向けた安全性の検証、運用能力の確立、自律航行や自律観測技術のさらなる安定化を目指した開発とともに、実際の観測運用フェーズに進んでいくとしている。