2021年4月5日、国立研究開発法人 海上・港湾・航空技術研究所 港湾空港技術研究所(以下、港空研)は、アミューズワンセルフが開発したグリーンレーザースキャナを搭載したハイブリッドドローンで、効率的に高精細な海底地形を計測できることを実証したと発表した。港空研によると、ハイブリッドドローンに搭載したグリーンレーザースキャナでの長時間の海底地形計測は世界初の試みだという。

実証実験は2021年3月1日に沖縄県竹富町西表島で行われ、陸上から水深約17m付近までの全長約2.6km、幅1kmの範囲を約4時間で計測し、陸上から浅海域の連続的な地形やサンゴ礁の複雑な地形を取得した。計測データ(水面と海底の両方を含む)は、平均で約12cm間隔の高密度かつ高さの平均誤差±2cmの高精度な結果となった。
これまで海底地形計測は船舶での音響測深が主流だったが、海象条件によっては実施が難しく、特に砕波帯(*1)での海底地形計測は危険で困難なものだった。砕波帯の地形情報は沿岸域防災や海岸管理の上で非常に重要なものである。近年になって、海底地形の計測においては水中透過性の高いグリーンレーザーによるLiDARが注目されはじめたが、当初グリーンレーザースキャナは大型で、ヘリコプターなどにしか搭載できなかった。浅海域の海底地形計測では、大量の計測点によって砕波の切れ間から海底を捉えることが必要となるが、大型の飛行体は機動力が低く、複数回のフライトが必要になるなど、コストの面からも計測を実施するのが難しかったという。
2018年、アミューズワンセルフは国土交通省 革新的河川管理プロジェクト「陸上・水中レーザードローン」のもとで小型かつ軽量のドローン搭載型グリーンレーザースキャナ「TDOT GREEN」を開発し、ドローンの高い機動力で高精細な地形データを取得するシステムを提案した。グリーンレーザースキャナは水中透過性の高い532nmの波長のレーザーを使用したLiDARスキャナのことで、光により3次元の地形情報を取得するものだ。その後、港空研とアミューズワンセルフは、河川から海域へと対象を発展させ、砕波帯下の海底地形計測における有用性の検証を連携して進めてきた。
大量の海底地形の点群データを取得できるグリーンレーザースキャナとドローンの有する高い機動力により、砕波帯を含めた沿岸域の地形を詳細に取得することができるようになってきた一方、ドローンの飛行時間はバッテリーがもつ20分程度が限界であり、バッテリー交換のために複数回の離発着を繰り返す必要があった。また、遠浅の地形などでの計測では、計測箇所に到着するまでにバッテリーを消費してしまうこともある。
そこで今回の実証では、新たに開発したハイブリッドドローンを使用し、グリーンレーザースキャナを搭載した状態で2時間以上の飛行を可能にし、実海域での地形計測を実施した。
本実証で用いたハイブリッドドローンは、小川精機が開発したドローン搭載型発電機レンジエクステンダーによりバッテリーに給電を行うもので、長時間のフライトが可能なだけでなく、バッテリーシステムもしくは発電機の片方が故障した際にも飛行を継続できる冗長性も有している。
*1 砕波帯 :波浪が海底の影響を受け変形することで、乱れを伴って崩れる領域。水深が浅くなる場所で砕波は生じやすくなる。
実証実験の成果
実施日 :3月1日
対象 :沖縄県竹富町西表島北部の海域
対象域には、グローブ林、砂浜、海草帯、サンゴ礁が含まれている。
対象域中央部においては全長約2.6km、幅1kmの範囲を計測し、東西両端部においては、それぞれ全長約1km、幅約550mと幅約350mの範囲を計測(図1)
・ 約1時間の計測を6回実施、計測に要した時間は合計6時間21分。燃料消費量から想定される本システムにおける1回の最大飛行可能時間は2時間以上。

・ 計測後、PPK-GNSS(*2)とIMU(*3)による最適軌跡解析を行い、スキャナの位置と姿勢を処理、高さ精度±2cm以内の点群データが得られた。
・ サイドラップ率が不十分な箇所があったものの、計測されている範囲では非常に高密度で地形が計測されている。
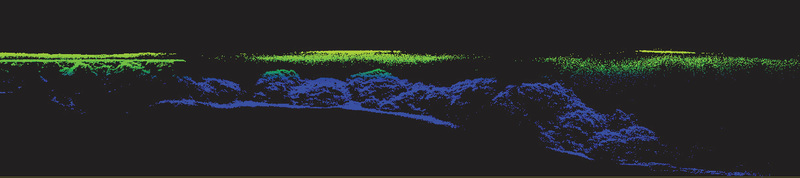
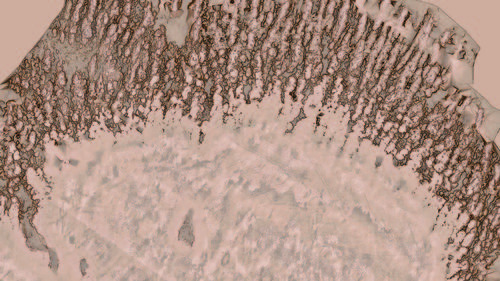
・ 水面も含めた全ての計測点の平均間隔は約12cmであり、陸上から浅海域にかけての連続的な地形(図2)やサンゴ礁の複雑な地形(図3、図4)なども詳細に把握が可能。
・ 今回の計測によって得られた最大水深は約20m。

港空研とアミューズワンセルフは、対象とする海域の透明度や海底性状に合わせた最適な地形計測条件については、今後さらに検討を重ねる必要があるとしている。
また、長時間の計測に伴ってこれまで以上に大量の点群データが得られることから、それらを効率的に処理する手法についても検討が必要だという。
ハイブリッドドローンに搭載されたグリーンレーザースキャナによって、沿岸域の詳細な地形が明らかになれば、より精緻な波浪予測や地形変化予測に寄与し、沿岸域の防災計画や適切な港湾開発の策定が可能となると考えられる。また、島国である日本固有の領土・領海を定期的に調査・管理する技術としての利用も考えられる。
港空研とアミューズワンセルフは、今回の実証実験の成功を沿岸・海洋分野における様々な課題のブレイクスルーになりうるとし、今後も海底地形の計測技術とその利活用方法のさらなる進展を進めていくとしている。
*2 PPK-GNSS :後処理キネマティック法による衛星測位システム。既知点である固定局において衛星信号を同時に受信し、補正情報を作成することで、移動局の誤差を小さくする手法の一つ。後処理により補正情報を利用する。
*3 IMU :慣性計測装置。加速度センサーや回転角加速度センサーなどを統合したユニットで、GNSSによる測位とIMU観測データ合わせて解析を行うことで、高精度な位置姿勢情報を得る。
ハイブリッドドローン機器仕様
| 燃料 | 混合ガソリン |
| ローター数 | 4 |
| 機器重量 | 概ね6kg |
| 最大飛行可能時間 | 6時間(ペイロード無し)/2時間(ペイロード3kg) |
| 最大操作可能範囲 | プロポによる(自動飛行範囲は無制限) |
| 最大速度 | 54km/h(適正運用) |
| ペイロード | 3kg |
| カメラ機能 | FPV用カメラあり |
| 測位システム | GPS/Galileo/GLOSNASS/BeiDou |
| RTK機能 | オプション |
「TDOT GREEN」機器仕様
| 本体サイズ | 約W280×D210×H140mm |
| 本体重量 | 約2.6kg(本体のみ/アンテナ除く) |
| 最長測定距離 | ≧10% 158m/≧60% 300m over |
| 測距精度(1σ) | ≧10% ±15mm/≧60% ±5mm |
| 発射レート | 60,000Hz/秒(90°) |
| 視野角 | 90°(±45°) |
| エコー切り替え | 1st&Last/4echo |
| スキャン速度 | 30走査/秒 |
| レーザー波長 | 532±1nm(グリーン) |
| ビーム拡がり角 | 1.0mrad |
| レーザークラス | クラス3R |
| 作動温度範囲 | 0 ~ +40℃ |
