2021年10月20日、東京大学 生産技術研究所は、UAV(以下ドローン)をAUV(自律型無人潜水機)など自律的な観測機器の母船とする実証試験を行ったことを発表した。
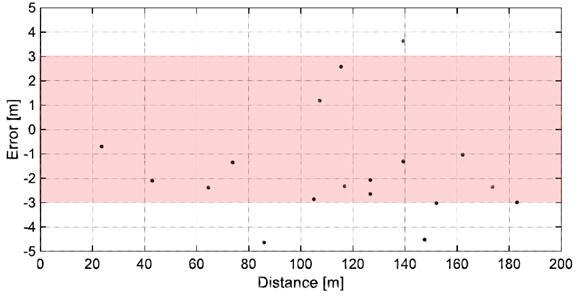
実証試験では、送信用と受信用の海中音響通信機器をそれぞれロープで吊るしたドローンを用意し、20~200mの距離を徐々に離して位置決定精度を検証。その結果、2~3m程度の誤差範囲に収まることを確認し、ドローンが沿岸域の海中・海底調査の海面基地として大きな利点を持つことがわかった。また、ドローンは船舶と比べて海中音響ノイズをほぼ発生させないことが確認できた。
ドローンを海中・海底探査の母船とする実証試験
海中・海底を自律的に調査する機器は、音響通信によって海面基地と情報を通信する必要があるが、海面基地のほとんどは船舶のため、大きなコストや機動性の不足が観測の課題となっていた。コストが低いドローンを海面基地として利用することが期待されているが、実証事例が不足しているのが現状である。
同大学の海中観測実装工学研究センター 横田裕輔准教授と明治大学 理工学部の松田匠未専任講師による研究グループは、海面でブイのように計測するドローンや海中計測を行うドローンの開発を行っており、その発展として今回プロドローンと連携し、AUVといった海中・海底機器との通信や、その母船としての作業の実証実験を実施した。
海中・海底観測機器の位置決定・通信の基地としてドローンを活用する方法は複数ある(図1)。この実験では、海中・海底機器との通信能力とその高効率性を実証するため、図1(a)(c)のように、送信用と受信用の海中音響通信機器をそれぞれロープで吊るしたドローンを用意し、20~200mの距離を徐々に離して位置決定精度を検証した。
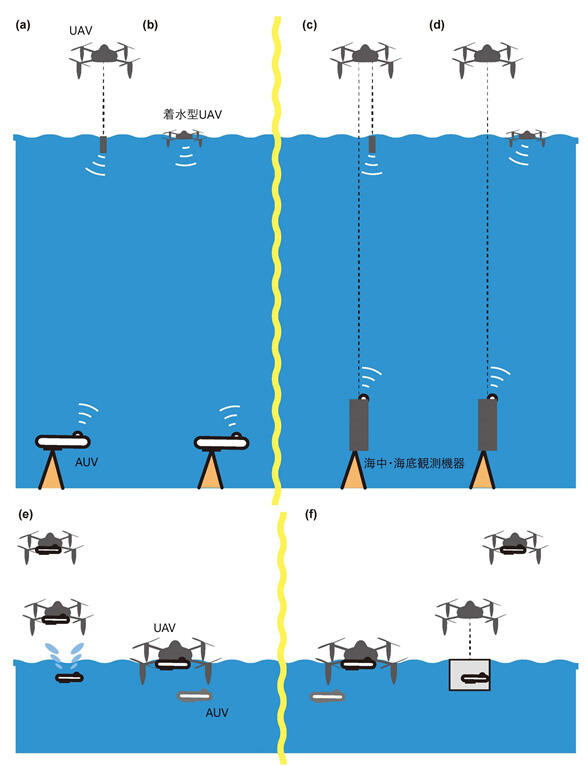
(a、b)AUV通信のためのドローン海面基地
(c、d)海中機器による計測・通信のためのドローン海面基地
(e、f)AUVなどの投入・回収を行うドローン海面基地
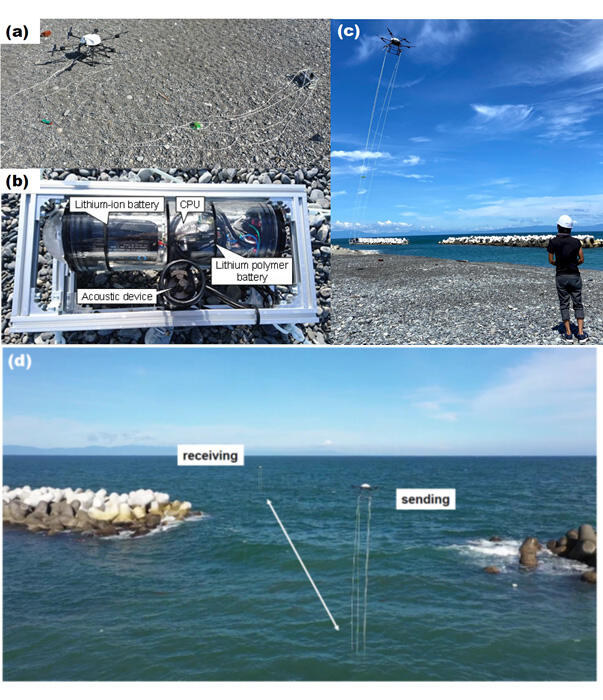
(a)海中音響機器をロープでドローンに接続。投入する深さを調整するため、約10mのロープを用いる。
(b)海中音響機器
(c)ドローンが飛行する様子
(d)観測の様子
その結果、200m程度の通信を確認。合計約10分の観測で、誤差範囲は2~3m程度に収まっていた(図3)。これは、波や流れが大きい海面環境では高い水準であるという。また、機体保持精度や海中音響ノイズも少なく、船舶等による機器の運用よりも優れていることが示された。
また、この研究により2つの研究課題が示された。ひとつは、ドローンの長時間運用を可能とする機体性能や動力源の開発。もうひとつは図1(e、f)のようにAUVなどを投入・回収するための運搬能力だ。海中・海底観測機器は沈める必要があるため重さを持たせているが、ドローンで運搬するためには軽量化が必要となる。
発表雑誌
雑誌名:Remote Sensing
論文タイトル:Underwater communication using UAVs to realize high-speed AUV deployment
著者:Yusuke Yokota and Takumi Matsuda
DOI番号:10.3390/rs13204173