12月6日から8日の3日間、東京ビッグサイトでインフラ維持管理に関する展示会「社会インフラテック2018」が開催された。この展示会を主催するインフラメンテナンス国民会議は、社会インフラの老朽化が急速に進む中で、そのメンテナンスを産官学民で考えていく活動として国土交通省が中心となって2016年11月に設立された。2018年からは「ドローン×インフラメンテナンス連続セミナー」をスタートするなど、活動が盛んになっており、この社会インフラテックもその一環として開催されたものだ。今回は橋梁点検車といったハード、ロープワークのような技術、画像解析のようなソフトといった出展に混ざって、橋梁や下水管などの点検を行うドローンやそのデータを扱うソリューションが数多く展示されていた。
自律制御システム研究所/NJS
飛行シーンをイメージできる大がかりな動態展示
日本を代表するドローンメーカーのひとつであるACSL(自律制御システム研究所)は、従来のプラットフォームである「PF1」の展示に加えて、次世代モデルにあたる「PF1-Delivery」を公開した。「機体名こそPF1-Deliveryとなっているが、いわば“PF2”ともいうべきモデル」と同社の鷲谷聡之COOが説明するとおり、フレーム、制御基板などすべてを刷新。CFRP製のフレームは基板やバッテリーをすべて内部に収めるモノコック構造となっていて、ローターアームまで一体とすることで従来のものより軽く仕立てられている。また、基板や制御アルゴリズムも改良されており、突風に強く、飛行時間も従来比で10~15%程度向上しているという。

会場の中でもひときわ大きなスペースをとっていたACSLのブース。そこでは機体の陳列にとどまらず、実際の利用シーンをイメージさせる大掛かりなセットが設けられていた。そのうちのひとつはPF1-miniのデモフライト用スペースで、倉庫をイメージしたもの。棚に並ぶ商品をPF1-miniが撮影して、在庫管理や棚卸しに活用しようというものだ。今回フライトしたPF1-miniは、従来1つだったカメラを2つにしてビジュアルSLAMをステレオ化することで、より安定した飛行を実現しているという。
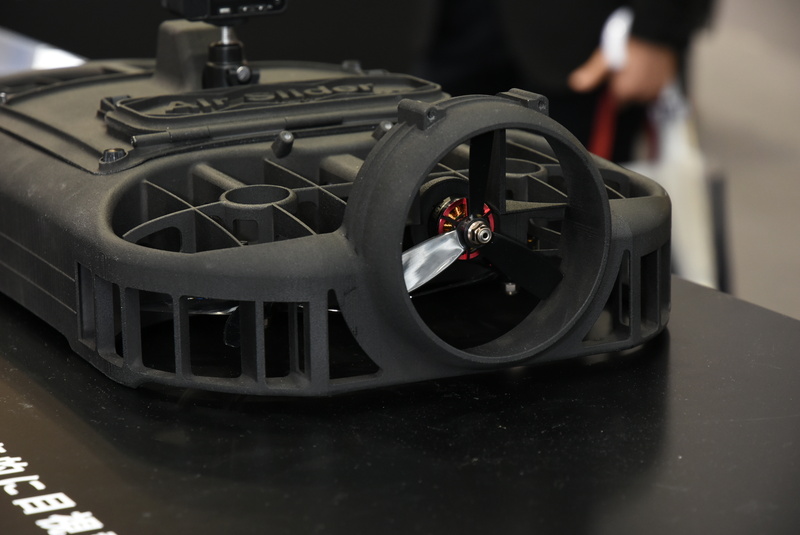
もうひとつの動態展示は、ブース内を横切るように設置されたセット。これはACSLが水道コンサルタントのNJSと共同で開発している管路・閉鎖性空間点検用ドローン「AS400」のフライトブースだ。AS400は管径400mm以上の管路を4つのローターによる浮力でホバークラフトのように浮いて進みながら、管路の内側の撮影を行う。操縦はタブレットによって行い、機体後部に付けたワイヤーを巻き戻す形で管路の先に到達した機体を回収する。


大日本コンサルタント
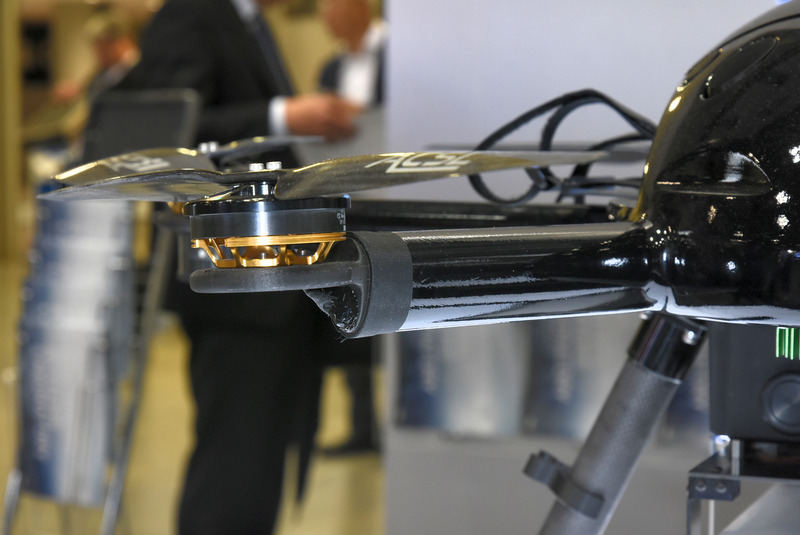
「一定離隔飛行制御」機能を持った可変ピッチクワッドコプター
建設コンサルタントの大日本コンサルタントは、川田テクノロジーズと共同で開発した橋梁点検用ドローン「マルコ」を展示。2016年からNEDOの助成事業で開発してきたマルコは、可変ピッチ機構を持ったクワッドコプターで、超音波センサーによって橋脚から一定の距離を保ちながら飛行が可能だ。その精度は非常に高く、通常は橋脚からカメラまでの距離が約2m、ローターガードからであれば1.5mの離隔を保って飛行できる。実験ではローターガードから50cmという極めて接近した状態での飛行も実現。橋梁付近は風の流れが複雑で、その中でこうした精密な飛行を可能としているのは、可変ピッチによる高い応答性の効果が大きいという。

三井住友建設
斜張橋のケーブルに抱き着いて撮影するドローン
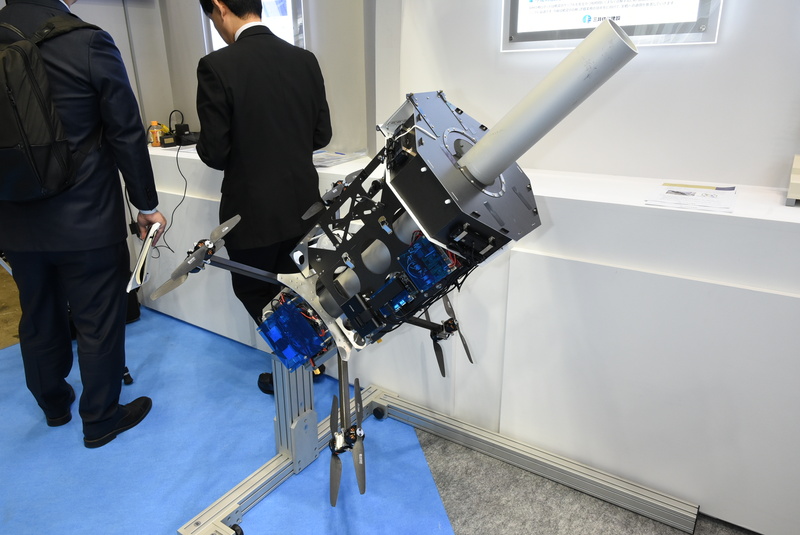
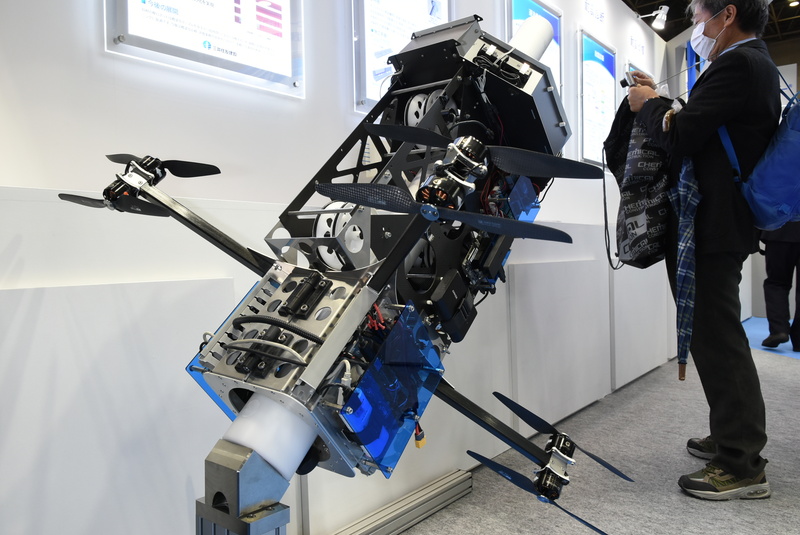
数多くの道路橋などを手がけているゼネコンの三井住友建設は、斜張橋ケーブル点検ロボットを出展していた。斜張橋は塔から斜めに張ったケーブルで橋桁を吊る形式の橋梁で、そのケーブルの点検にはこれまで双眼鏡による目視点検や、高所作業車を使ったり点検員の宙乗りといった手法が用いられてきた。こうした作業を代替するのがこのロボットだ。
機体は上部の撮影ユニットと下部の昇降ユニットに分かれていて、まず昇降機ユニットが撮影ユニットをケーブルの上部まで押し上げる。頂部に達したら昇降ユニットのみ下降し、撮影ユニットはケーブルに密着させたローラーでブレーキをかけてゆっくりと降下しながら撮影を行っていくというもの。撮影は4台のカメラでケーブル全周を一度に撮影し、撮影後にパノラマ画像化することで解析を行う。
昇降ユニットは8つのローターを4つのアームに固定した二重反転式のオクトコプターで、下降後は素早くケーブルから取り外して別の撮影ユニットを押し上げることができるため、一度に複数のケーブルを短時間に撮影できるのが特徴だ。また、ローター間が1mにも満たないため、作業時に道路規制をかける必要がないというメリットもある。
ノダック
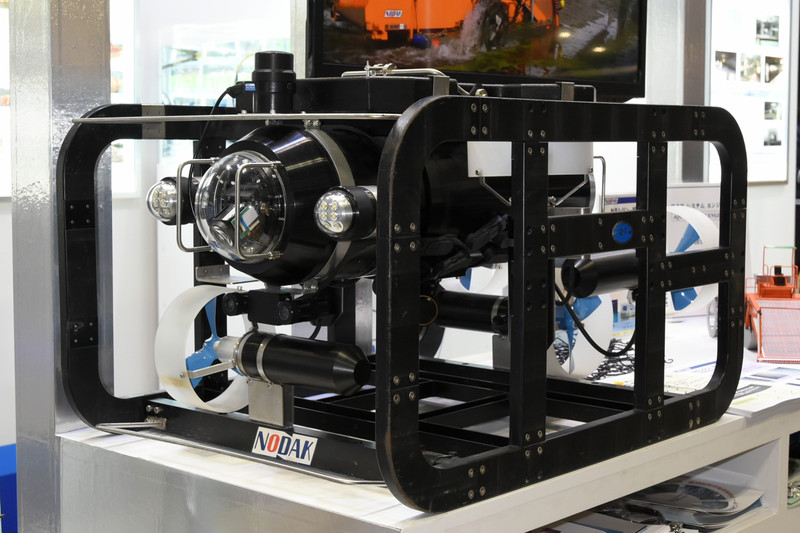
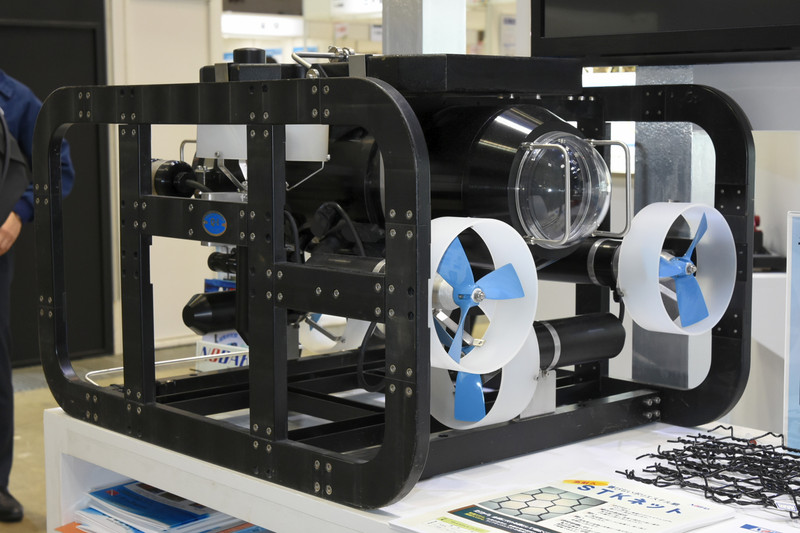
光ネットワークがケーブル延長500mを実現したROV
飛島建設グループのノダックは光ネットワーク伝送式水中テレビロボット「DELTA-200.net」を出展していた。このROVはQI(キューアイ)の製品で、映像伝送に光ネットワークを採用することで、信号減衰などの問題でこれまで難しかった深海や長距離の調査を可能としたものだ。水深200m、ケーブル延長500mまでの作業が可能で、120万画素3倍ズームカメラでハイビジョン画質の映像を撮影できる。