2021年1月27日、エバーブルーテクノロジーズは、飛行する帆船型ドローン「Type-P」の技術開発および実証テストを開始し、飛行および着水後の海上での自動操船に成功したことを発表した。

実証テスト概要および結果
今回の実証テストに使用した「Type-P」は、水上での様々な調査、運搬を目的とした自動帆走の取り組みのなかで、護岸されていない河川や、岩礁が多い海域など、エントリーが難しいエリアや目的地が沿岸から離れている場所などを想定し、飛行して移動・着水することで水上航行・回遊を開始するまでの移動時間を短縮することを可能とするためのモデルとして検討、研究開発をしているドローンである。
今回の実証テストでは、既存固定翼機をベースに自動帆走機構やセンサー、各種IoT機器の搭載を可能にするため、独自に設計製造をしている。
実証テスト
実施エリア :シンガポール
概要 :桟橋からハンドローンチにより離陸、約10分間飛行させた後に海面へ着水。飛行時に収納状態だったセールを展開し、風力だけで推進し桟橋へ着岸した。
これまで、桟橋やビーチが整備されていない浅瀬、暗岩・洗岩がある岸壁などの沿岸部や、雑草が生い茂った河岸では、測定機器を搭載した小型ボートを持ち込み航行させることが困難なため調査が難しいとされていた。今回の実証テストの成功を受け、こうした有人では入りにくかった浅い沿岸部や河川部において、水深、水質調査や魚群探知を無人で実施可能になる。
また、海水浴場や沿岸部などで、沖に流された要救助者の発見と着水後の伴走を行うことで要救助者の位置把握が正確となることから、救助時間短縮を可能にするといった、水場での救護用途などでも期待されている。今後、本格的な導入に向けてさらなる開発のフェーズに入る。
実証実験で証明された条件と概要
・ モーターをプロペラの推進力とする固定翼機として飛行することで、帆船の約20倍、最高速度100km/h、巡航速度45km/hで目標活動海域に移動。
・ 着水後、収納していたセールを展開し、その後モーターを停止。ヨットと同様に自然風だけで帆走することでバッテリー消費を約1/60に抑え、60倍の長時間稼働を実現。
想定する活用イメージ
固定翼機の飛行と帆船の長時間稼働の長所を両立することで、例えば河川やダムの堆積物調査などで、川に入るまでに時間と労力がかかっていたような場所でも、飛行して移動することで障害物を飛び越えて目的地に到着し調査活動を実施、その後、下流側で回収するといった活用を想定している。
また従来のマルチコプター型ドローンでは、1回の飛行時間が10分〜20分と制限されていることから難しかった遭難者の捜索も、固定翼機の高速移動と滞空時間の長さに加え、往路は飛行、復路は帆走することで捜索距離を約2倍に伸ばすことができるため、実現が可能となる。
飛行する帆船型ドローン「Type-P」概要
開発経緯
Type-Pの開発では、高速長距離移動が可能な固定翼機の特性を活かし、素早くターゲット水域に着水し、着水後は帆走による低消費電力な航行や滞留が可能な帆走飛行艇のプロトタイピングを実施した。
本プロジェクトでは、移動・運搬時とミッション実行時で大きく形態を変えるType-Cの開発も行っており、状態によって形態変化する点でその延長線上にある。
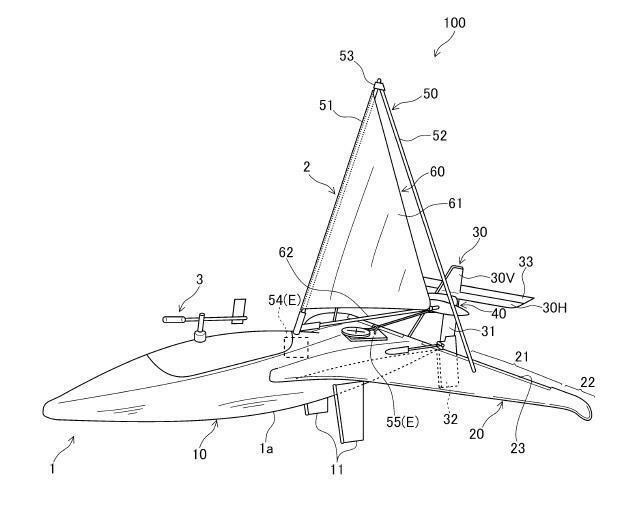
船体デザイン
既存の固定翼機をベースに格納可能なセールや帆走時に必要となるラダー、センターボードを追加。シンプルな構造で最大の効率を引き出すことと軽量化に配慮している。
今後のステップとして、運用試験を通して想定ミッションとその際の海況に耐えうる船型(飛行体の設計も含む)と帆艤装(ぎそう)形態を明確にし、可用性とのバランスを考慮しながら、大型化(長航続距離化、ペイロードの増大)を実現する。
また、効率化軽量化に加えて、最良の帆艤装が最良の飛行形態と合致しない部分もあるため、ドローンのユースケースやユーザエクスペリエンスを考慮しながら設計に反映させていく。
ソフトウェア開発
現在のモデルはオープンソースUAV開発プラットフォームである「Ardupilot」を使い、制御(飛行時はArduplane、帆走時はArdu Roverのsailオプションを使用)している。
今後は、帆走制御と飛行制御のファームウェアの切り替え機能の実装、セイルの特性に最適化された帆走アルゴリズム、ミッション(滞留、先遣モニタリング、長距離オペレーションなど)に応じた、飛行/帆走時間の最適化などを進めていく。
シンガポール国立大学との共同研究と特許出願
本開発はシンガポール大学との共同研究成果の一部として、研究開発で得られた成果を国際特許出願中である。
開発協力:末田 航 氏(Drone Specialist, PhD)
シンガポール国立大学スマートシステム研究所シニアリサーチフェロー
<末田 航 氏プロフィール>
HCI(ヒューマンコンピュータインタラクション)、エンタテインメントコンピューティングの専門をバックグラウンドに、ドローンを対話装置として活用する研究、とりわけカラスと対話するUI/UXを提供するドローンと地上システムの研究開発「カラスと対話するプロジェクト」、Hart-to-follow Sports(状況把握が困難なスポーツ)のメディア技術を活用した可視化に関する研究に従事。競技の興行化促進や娯楽性向上を目指すこの研究を通して、セーリングを支援するデバイス開発や、楽しくドローンレースの状況把握ができる観戦システムを開発。これらの背景からドローンとヨットの自動運用のアドバイザーとして、シンガポール国立大学を拠点に本プロジェクトに参画。
エバーブルーテクノロジーズ事業背景
エバーブルーテクノロジーズは、従来の動力船を自動操船技術による効率的な自動帆走に置き換えることで、地球温暖化ガスを抑制し、持続可能な社会の実現に貢献することをミッションとしている。
近年、あらゆる産業で地球温暖化防止のための施策が求められているが、海上を舞台とする産業ではいまだに内燃機関が主力であり、決定的な方策が打ち出されていない。
また陸上交通の電動化による将来的な電力不足も予測される中、国土の狭い日本では太陽光発電による電力供給に限界があることから、波力、潮力、地熱、風力といった海上の再生可能エネルギーの活用が注目されている。
しかし海中送電ケーブルの敷設コストの高さや、動力船を電気推進船に置き換えるための大型バッテリー積載容量、重量、充電時間確保といったハードルから、海上の再生可能エネルギーの活用も現実的ではない。一部では水素を使った燃料電池の活用が有望ともいわれているが、そのためには低コストで水素を大量に用意する必要があり、実現には時間がかかると考えられている。
エバーブルーテクノロジーズはこうした課題の解決策として、産業革命以前の海上交通で活用されていた帆走に着目した。
海上の再生可能エネルギーを水素に変換して自動操船ヨットで運搬することにより、海上水素サプライチェーンを構築し、動力船をゼロエミッションの帆船または電気推進船に置き換えていく未来を目指している。
こうしたビジョンのもと、2019年より全長1mクラスのRCヨットモデルを改造した実証機での自動操船実験を開始。運用化に向け、2020年には2mクラスの実証機を開発、実証実験を進めている。
今後の事業展開
エバーブルーテクノロジーズでは、自動操船ヨットの製造販売、サービス提供、自動帆走技術提供などを主な事業とし、カーボンフリーな世界の実現を目指している。
将来的には海上の再生可能エネルギー、潮力、波力、風力由来の電力を使用して水素を製造し、エネルギー消費地へ自動運搬する水素エネルギーサプライチェーン「Hydroloop(ハイドロループ)」の実現を構想している。
今後、陸上交通の電力化で起こる電力不足を解決するとともに、これまで有効な代替手段がなかった動力船のゼロエミッション化を実現するため、水素エネルギーを利用した電気推進船への転換促進、水素エネルギー補給を海上で実現させるサービスを展開する計画であるという。