2020年10月20日、情報通信研究機構(以下NICT)ソーシャルICTシステム研究室は、免許不要IoT無線通信規格 Wi-SUN(※1)と近距離無線通信技術 BLE(※2)等を活用した、非接触エレベーター移動支援システムを開発したことを発表した。自律移動型ロボットやスマートフォンを携帯した人が、非接触で簡単にエレベーターを自ら呼び出し、搭乗、行き先フロアを指定して、異なるフロア間を移動することができる。既設エレベーターの制御システムを改修することなく、エレベーター内外の呼出しボタンまたは行き先指定ボタンに小型のIoTボタン押下デバイスを設置するだけの簡単・迅速・低コストな仕組みとなっている。
※1 Wi-SUNアライアンスが普及推進活動を実施しているIoT向け国際無線標準規格。国内ではスマートメーター用途として普及している。全世界のデバイス数は9,000万以上。通信速度は100kbps。
※2 Bluetooth Low Energyの略称で、近距離無線通信技術Bluetoothの拡張仕様の一つ。極低電力で通信可能という特徴を持つ。2010年7月に発表されたBluetooth 4.0規格の一部として策定された。
背景
ニューノーマル時代の駅構内、オフィス、病院やホテルでは、様々な業種のロボット(警備・清掃・案内ロボットのほか、消毒作業ロボット、非接触でモノの運搬や飲料等の自動販売を行うロボット等)が広く活躍することが期待される。こういった構内や建造物内でより広範にロボットが各種サービスを展開するためには、フロア間の移動が欠かせない。しかし、従来の方法では、管理センターからの集中管理制御による停止・行き先指定・扉の開閉等が可能なエレベーターを備える必要があり、移動しようとするロボットは、管理センターと携帯電話回線等を使って通信し、現在地と行き先等を指定することでエレベーターの遠隔制御を依頼する必要があった。したがって、ロボットによるエレベーター利用時間中はエレベーターが管理センターによる集中管理制御下となり、同一エレベーターを人と共用することが困難であった。
今回の成果
こうした背景と課題の下、NICTソーシャルICTシステム研究室は、Wi-SUNとBLE等を組み合わせて用いることで、自律移動型ロボットをフロア移動に必要なエレベーター前まで誘導し、非接触でエレベーターの呼出しと行き先フロアの指定を可能とするエレベーター移動支援システムを開発し、NICT構内における実証実験に成功した。今後、JR東日本商事およびアンドロボティクスと共同で、構内や屋外での実証実験を実施する予定である。

実証実験では、今回新たに開発したBLE通信機能を備えるIoTボタン押下デバイス(WiWi-Finger)を、ロボットがフロア間移動で用いるエレベーターの内外ボタンに取り付けている。フロア移動を行おうとする自律移動型ロボットもBLE通信機能を備えており、WiWi-Fingerと通信可能なエリア(周辺数メートル内)に移動できた場合には、BLEを用いた近距離無線通信によって、エレベーターボタンの操作が非接触で可能となる仕組みとなっている。
また、自律移動型ロボットにはWi-SUNを活用した通信機能も搭載されており、比較的遠方(~数百メートル)からの移動制御やリクエスト情報の受付が可能。この仕組みを使って、エレベーター操作が可能となる上記WiWi-Fingerとの通信可能エリアを知ることができる。
なお、実証実験では、NICTが別途開発したNFC(※3)とWi-SUNを統合的に活用する小型のIoTメッセージ通知デバイス(WiWi-Assistant)を使って、遠方に待機中の自律移動型ロボットを呼び出す方法で実験を行った。具体的には、サービスロボットによる飲料等の非接触デリバリーサービスを想定し、NFCリーダー機能を備えるWiWi-Assistantを別途用意したNFCタグにかざして、搬送依頼を行う商品情報と搬送先の位置情報等を読み取る。WiWi-Assistantが備える「発信ボタン」を押下することで、この情報がWi-SUNを用いて広く周辺に発信され、周辺に待機するロボットに依頼内容が通知される仕組みになっており、利用者にとって直感的操作性と汎用性の高い方法で実現した。
※3 Near Field Communicationの略称で、国際標準規格の近距離無線通信方式。約10cm程度の範囲で106kbps~424kbpsでの双方向通信が可能。スマートフォン、パソコン、デジタルカメラ、ICカードへの導入が進んでいる。
エレベーター移動支援システムの特徴
・既設エレベーターの制御システムに改修を行う必要がなく、小型のIoTボタン押下デバイス(WiWi-Finger)をエレベーターの内外ボタン部分に設置するだけで、自律移動型ロボットによるフロアをまたいだ移動が可能となる
・WiWi-Fingerは、BLE通信機能によって、同通信機能を有する自律移動型ロボットや、一般的なスマートフォン等を携帯した人による非接触でのエレベーターの呼出し、行き先フロアの指定を可能にする
・IoT向け無線通信規格Wi-SUNを用いた通信機能をWiWi-Fingerに搭載することで、同一フロアの自律移動型ロボットやWi-SUN機能付きスマートフォンを携帯した人等に、エレベーターの位置を知らせてスムーズに誘導することができる
・単価数十円のNFC(近距離無線通信)タグからの情報読み取りとWi-SUN(省電力IoT無線通信規格の一つ)の組み合わせで、直感的操作性と汎用性の高い、ロボットの呼出し・誘導制御を実現
・エレベーターをロボット専用に切り換えるなどのセンター制御を必要とせず、人とロボットがエレベーターを共用できるため、一般利用者にも不便を感じさせない
今後の展望
本エレベーター移動支援システムは、一般的なスマートフォンにも搭載されているBLEを用いるIoT通信デバイスを、構内移動ロボットやエレベーターのボタン部分に設置することで実現している。したがって、新型コロナウイルス接触確認アプリと同等の原理で、陽性者との接触を検知・記録し、さらに、周辺の離れたデバイス等にWi-SUNで伝達することも可能となり、病院内等での応用としても期待される。なお、構内だけでなく屋外空間においても、例えば、非接触で押しボタン信号を操作するなどの応用が期待される。
今後、協力機関であるJR東日本商事のほか、アンドロボティクス社等のロボット事業者と連携した構内・屋外での利活用実証実験を展開し、人とロボットが共存・協調する未来の移動手段とIoT技術の利活用方法に関わる実証実験を推進する、としている。
エレベーター移動支援システム、ロボットのフロア移動実証 詳細
1. エレベーター移動支援の仕組み
NICTソーシャルICT研究室は、自律移動型ロボットによるエレベーター移動支援の仕組みを実現するために、小型のIoTボタン押下デバイス(WiWi-Finger)を開発。これは、BLEによる通信機能およびモーターによるボタン押下機構を備える小型デバイスである。エレベーター外の呼出しボタンやエレベーター内の行き先フロアボタンに被せるように設置して利用する。

WiWi-Fingerは、ロボット側のBLE通信モジュールからボタン押下コマンドを受信すると、ボタン押下機構により物理的にボタンを押し、一定時間経過後に自動的にボタンを離す。ロボット側のBLE通信モジュールは、BLEペアリングと呼ぶ1対1通信のコネクションを特定のWiWi-Fingerとのみ確立するため、複数の行き先フロアボタンにそれぞれ異なるWiWi-Fingerを設置しても、行き先フロアに対応したWiWi-Fingerだけをボタン押下することができる。
実証実験で利用した自律移動型ロボットは、縦539mm、横460mm、高さ1,088mm。LiDARを使って常に周辺の障害物等との距離を計測し、障害物を回避しながら自律的に移動することができる。自己位置推定と環境地図作成を同時に行うSLAM(Simultaneous Localization and Mapping)を採用した地図自動作成機能を備えており、リアルタイムに自らの周辺環境の変化も捉えた地図を更新しながら現在地を推定し、与えられた目的地点に向かうことができる。

実証実験では、このロボットにWi-SUN通信モジュールとBLE通信モジュールを新たに追加搭載。Wi-SUN通信モジュールは、比較的遠方(~数百メートル)からのナビゲーション情報やリクエスト情報を受信し、そこからWiWi-Fingerと通信可能なエリア(周辺数メートル内)の情報を抽出して、この情報に基づきロボットをエレベーターまで誘導する。ロボットがエレベーター前に到着すると、BLE通信モジュールを使って、WiWi-Fingerにエレベーターボタンの押下を指示し、エレベーターボタンの操作が非接触で可能となる。
今回、ロボット向けにエレベーター(EV)連携制御部とBLE通信モジュールを新たに開発し、ロボット駆動制御部と連携動作可能な構成でロボットに実装した。具体的には、Wi-SUN通信モジュールが受信したナビゲーション情報をロボット駆動制御部が、エレベーター前の位置座標に変換し、目的地座標として設定することで、ロボットがエレベーター前への自律移動を開始する。
エレベーター前に到達したことを検知したロボット制御部は、次に、エレベーター連携制御部に対して、WiWi-Fingerによるエレベーターボタン操作を指示する。エレベーター連携制御部は、この指示に基づき、BLE通信モジュールを介してWiWi-Fingerを駆動する仕組みになっている。
BLE通信モジュールは、USBケーブルでロボット制御部と接続できる構造と、WiWi-FingerとのBLE接続の確立やボタン操作に関わる入力インタフェースを備えているため、このBLE通信モジュールを取り付けることで、今回使用したロボット以外の様々な業種のロボットに対してエレベーター移動支援を提供することができる。

今回の実験では、IoTメッセージ端末(WiWi-Assistant)が発信するWi-SUN無線フレームに、エレベーターに設置された上記WiWi-FingerとBLEで通信可能なエリア情報も併せて搭載する構成とした。この仕組みにより、異なるフロアへの移動を必要とするロボットは、フロア内のエレベーターの位置を把握し、エレベーター前を目的地として自律移動することができる。無線通信方式として、数百メートル程度の広い通信エリアを特徴とするWi-SUNを活用することで、広いフロアや構造が複雑なフロアでも利用しやすくなる。
目下、BLEのみでなくWi-SUNによる情報発信機能も集積搭載した小型のIoTボタン押下デバイス(WiWi-Finger2)を開発中である。これをエレベーターのボタン等に設置すれば、例えば、異なるフロアへの移動を必要とするロボットが、周辺のアクセス可能なエレベーターの有無や詳細位置を、IoTボタン押下デバイスからWi-SUNを活用して直接教えてもらうことも可能になる見通しであるという。
2. NICT構内におけるロボットのフロア移動実証の様子
食品・飲料等の自動販売やデリバリーを行うサービスロボットを想定し、3Fで待機中の自律移動型ロボットが注文情報を受信し、途中、エレベーター乗降を経て、4Fの配送先まで移動するシナリオを想定した検証を行った。
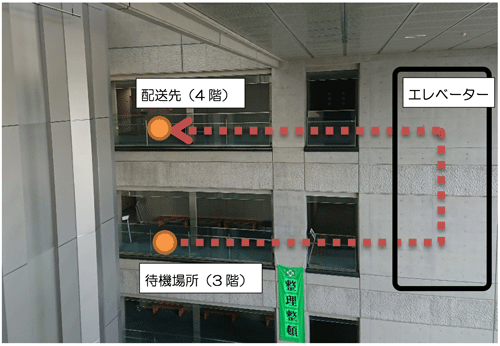
① 3Fで待機中のロボットは、4F配送先にあるIoTメッセージ通知端末(WiWi-Assistant)からWi-SUNで発信された注文情報を受信して、3Fエレベーター乗り場の詳細位置を把握し、その乗り口付近を第1目的地として自律走行を始める。
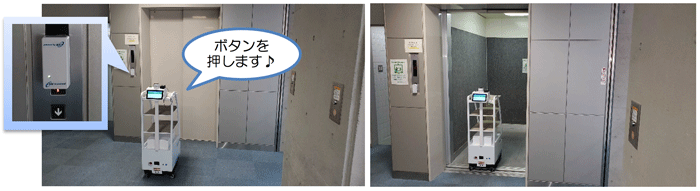
② ロボットはエレベーター前に到着後、エレベーター外部に設置したWiWi-Fingerに呼出しボタン(昇るボタン)押下を指示し、エレベーターを呼び出す(図5左)。この時、ロボットは周辺の人や同乗しようとするエレベーター利用者に聞こえるように「ボタンを押します」と音声を発話する。
③ エレベーターが到着し、扉が開くとエレベーターに乗り込む(図5右)。この時、エレベーター内の中央の位置を第2目的地として設定してあり、ロボットは扉を障害物として認識するため、扉が閉まった状態では静止状態を維持し、扉が開いたタイミングでエレベーターに乗り込む。
④ エレベーターに乗り込んだロボットは、まず、行き先フロアの4Fボタンに設置したWiWi-Fingerにボタン押下コマンドを送信し、4Fボタンを押す。並行して、自律走行に必要な内部地図を、現在の3F地図から行き先フロアの4F地図に自動切替する。この時、開始姿勢を扉向きと設定することで、ロボットがエレベーター移動中に180°方向転換する動作を実現している(図6左)。
⑤ 行き先フロアの4Fに到着しエレベーターの扉が開くと、ロボットはエレベーターを降りる(図6右)。乗り込む時と同様に、エレベーター正面の外側の位置を第3目的地として設定することで、エレベーターの扉が開いたタイミングでエレベーターから降りる動作を実現している。

3. まとめ・今後の展望
今回、IoT無線通信規格Wi-SUNと近距離無線通信技術BLE等を組み合わせて用いることで、自律移動型ロボットをフロア移動に必要なエレベーター前まで誘導し、非接触でエレベーターの呼出しと行き先フロアの指定を可能とするエレベーター移動支援システムを開発し、NICT構内における移動実験に成功した。
今後、協力機関であるJR東日本商事のほか、アンドロボティクス社等のロボット事業者と連携し、警備・清掃・案内ロボットのほか、消毒作業ロボット、非接触でモノの運搬や飲料等の自動販売を行うロボットといった、構内・屋外での利活用実証実験を展開し、人とロボットが共存・協調する未来の移動手段とIoT技術の利活用方法に関わる実証実験を推進する予定である。
また、IoTボタン押下デバイスWiWi-Fingerの小型化・省電力化や、静電容量型のボタンへの対応も進めたい、としている。