2025年2月19日、信州大学繊維学部 機械・ロボット学科の照月大悟准教授、千葉大学大学院工学研究院の中田敏是准教授、同大大学院融合理工学府博士後期課程2年の福井千海氏らの研究グループは、匂いセンサーと探索アルゴリズムを大幅に改良した次世代嗅覚飛行ロボット(バイオハイブリッドドローン)の開発に成功したことを発表した。
同研究グループは、生きた昆虫の触角を使ったバイオハイブリッドドローンを開発し、匂いの発生源を探索する研究を進めている。
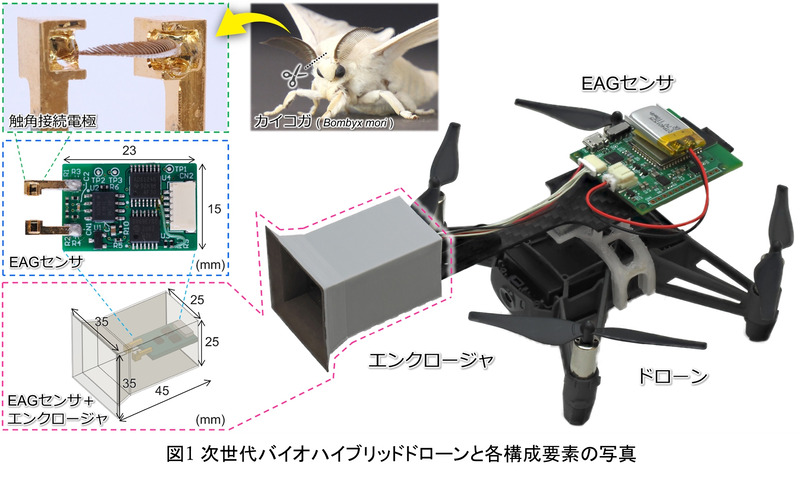
バイオハイブリッドドローンは、生物の優れた嗅覚と小型ドローンを融合したシステム。同システムは、従来のカメラやレーザー技術を補完し、匂いを使ったナビゲーションを行うことが特徴だ。この研究では、生物が行う匂い源探索行動からヒントを得て、ドローンの匂い追跡能力を向上させる、以下2つの重要な要素を明らかにした。
- 匂いセンサーを特別なエンクロージャー(カバー)で覆い、匂いの方向感知能力を高めること
- 戦略的に動きを停止する、生物に学んだ「段階的回転アルゴリズム」を導入すること
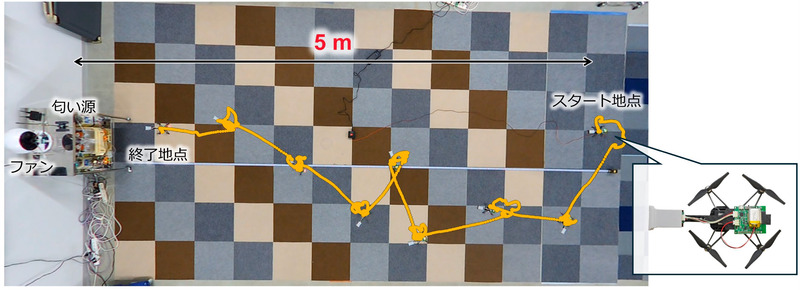
これらを統合した次世代バイオハイブリッドドローンは、探索精度が2倍以上に向上し、探索距離は最大5mに達した。このドローンは、カメラなどの画像情報の利用が困難な災害環境において、匂いを利用して要救助者を発見する新しい災害救助システムの実現に貢献すると期待される。
同研究成果は、ネイチャー・パートナー・ジャーナル(npj)のロボット系雑誌であるnpj Roboticsに、2025年2月5日公開された。