2025年2月18日、ロックガレッジは、ホバークラフト型水上ドローンの開発プロジェクトのPoC(Proof of Concept)を完了し、水上構造物点検の実証に成功したことを発表した。
同プロジェクトは、2022年度採択の経済産業省「成長型中小企業等研究開発支援事業(Go-Tech事業)」において3か年にわたり進めてきたもの。水上で全方向に移動可能な移動ロボットを創出することで、飛行型ドローンではアクセスが難しく危険を伴う狭所に対する新たな点検手段を提供することを目的としている。


プロジェクトでは2022年度および2023年度にかけて、機体の設計・製作および小型化を進めるとともに、制御ソフトウェアの開発や、360度カメラを活用したFPV(一人称視点)操縦システムの開発に取り組んだ。
最終となる2024年度は、走行性能の向上に注力するとともに、機体が撮影した映像のクラウドサーバーへの自動送信、配信、水上構造物を対象とした機体搭載カメラによる点検撮影を総合的に実現した。
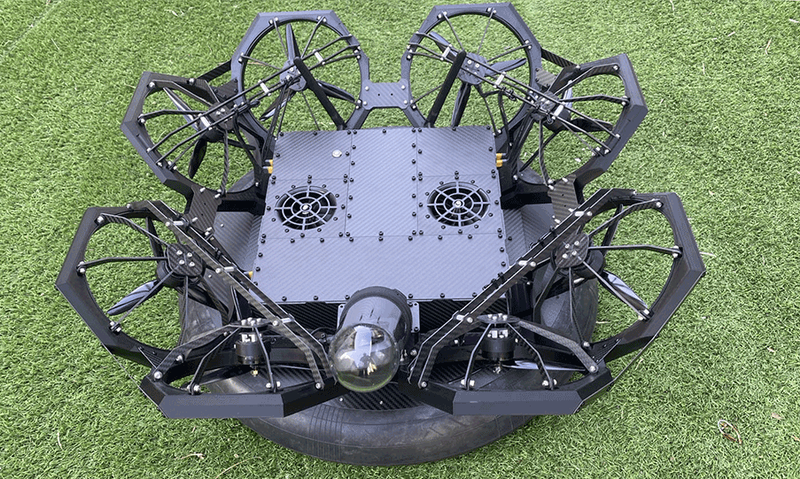
水上ドローンは一人で持ち運べる小型サイズで、全方向移動構造により水面を自在に航行する。
ロックガレッジは、陸上用ホバークラフトの製作経験を応用し、水上移動に適した水上用ドローン機体を設計・製作。機体設計では、水陸空の移動に対応した移動体の実現が可能な新規性のある推進機構を発明し、特許出願・登録を行った。
水流や慣性の影響により困難となる操縦を補助するため、フィードバック制御による操縦アシストを実装。水路の点検を自動化するための自律制御技術の研究開発に取り組んだ。

点検経路の設計、点検中の状況確認を行うためのFPV機能を有するユーザーインターフェースの開発に取り組んでおり、今後はネットワークを通じたデータ管理や解析を自動化するバックエンドシステムを開発し、データ処理の面でも点検作業の自動化を目指す。


今後ロックガレッジは、社会実装に向けて機体の実地検証を続けるとしている。また、同社が開発した情報共有システム「3rd-EYE」と連携することで、リアルタイムの点検映像をスマートグラスやタブレット上に配信し、AI処理の適用をクラウドで実行することが可能となる。これにより、業務の効率化と利便性向上を追求し、革新的なサービスの提供を目指す。
