2023年10月2日、日本電信電話(以下、NTT)は、東京大学と共同で、周囲環境の情報を伝える標識として機能するミリ波(※1)RFIDタグ(※2)を開発したと発表した。
可視光に比べて天候の影響を受けにくいミリ波で読み取れるRFIDタグを用いて、暗闇や悪天候による視界不良状況下でのドローンの航法精度を向上させる。将来的には海域や被災地等の情報把握が困難であった未踏領域においても、全日全天候下で空から環境を計測し続けるセンサネットワークを構築し、気象予測や災害対応を高度化するとしている。
※1 ミリ波:周波数が30GHz - 300Gの電波。指向性や透過性が高く、車に搭載される車間距離センサとしても使用されている。
※2 RFIDタグ:Radio Frequency Identification。タグに埋め込まれた情報を電波により読み取ることができるシステムの総称。
夜間や霧、雨天などに弱い、カメラを用いた画像認識技術
2022年12月に施行された改正航空法により、ドローンは有人地帯での無人飛行が可能となった。環境計測から物流までさまざまな業務において、ドローンの活用は昼夜・天候を問わず求められている。災害時の救援活動や、海域を含む広範囲の地球環境観測を通じた気象予測精度向上などへの貢献が期待されている。
一方、現在のドローンの無人飛行はカメラを用いた画像認識技術に大きく依存しているため、夜間や霧、雨天時など画像認識が困難な状況下では、飛行性能が著しく低下するという問題があった。こうした状況下であってもドローンが周囲の状況を適切に把握し、自動着陸や物資運搬などの飛行を可能とする航法の高精度化が必要である。
空中から広範囲で位置や情報を読み取れるRFIDタグ
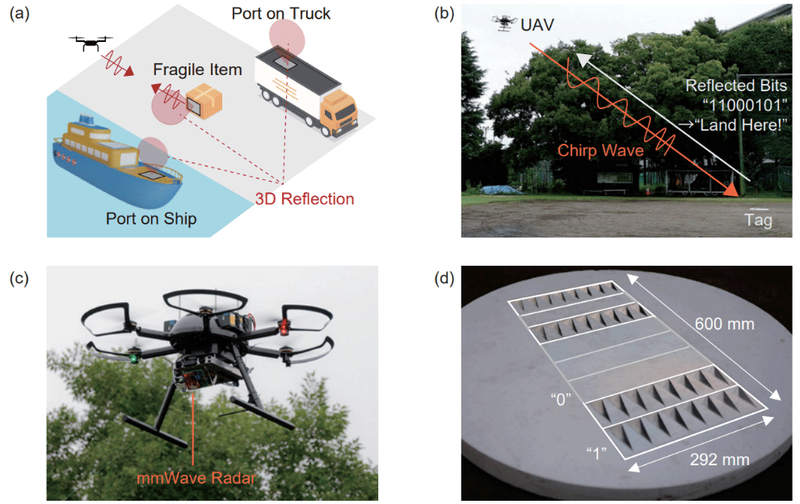
ドローンに搭載可能な小型のミリ波レーダを用いて、空中から広範囲で位置と情報を読み取れるバッテリーレスなRFIDタグを開発。タグを周囲環境の情報を伝える標識として活用することでドローンの航法を高精度化し、視界不良下での高度な自律飛行が可能になる。
これまでにもドローンの航法・飛行誘導に関するさまざまな手法が提案されてきたが、同技術は視界不良下で機能し、電源を設置できない場所でも利用できる。これにより、電源の設置が難しい未踏領域においても全天候型のドローンが自律的に活動し、災害対応や気象予測の高度化に貢献する。
また、従来のミリ波RFID技術が抱えていた、読み取り範囲の狭さや周辺構造物による読み取り性能の低下という問題を解決するため、タグの構造設計と信号処理手法を新たに確立した。
開発した機器および技術詳細
タグの構造設計:空中の広範囲から読み取れるコーナリフレクタ型チップレスRFID
従来のRFIDでは、平面型のアンテナを使用するため電波反射範囲が狭く、空中から読み取れる範囲が限られていた。そこで、3次元の再帰性反射を有するコーナリフレクタを利用した新たなタグ設計手法を開発した。
具体的には、コーナリフレクタ構造の形状変化(図2a)やバーコードのような配置によるビットパターンと読み取り可能距離の設計手法(図2b)を確立した。
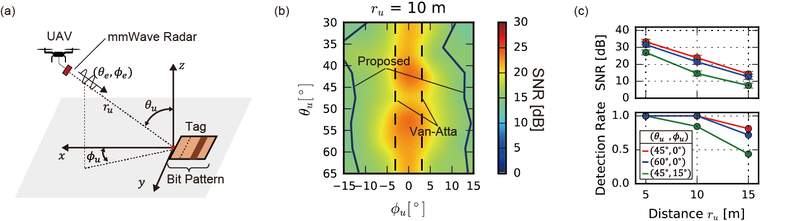
実験により、10m以上の距離から仰角30度以上および方位角20度以上の範囲で読み取れ、3次元の読み取り可能な角度が従来の7.8倍以上となることを示した(図3)。
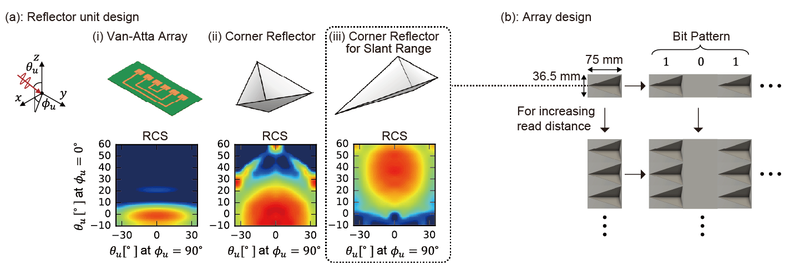
※3 Van-Atta Array:平面アンテナアレーにおいて、広い範囲への反射を実現するアンテナ配置方法。
信号処理:ノイズの多い環境下でも高精度にタグを読み取るための固有値解析とクラスタリング
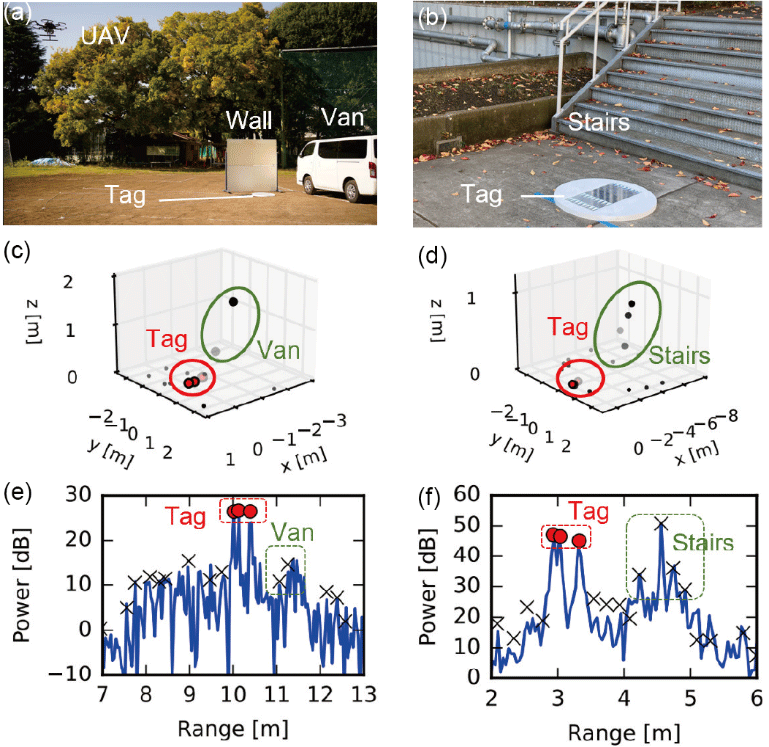
ミリ波レーダ信号処理における、従来のFFT(※4)を使用した位置推定では、空間解像度が固定されているため、ビットパターンの読み取り成功率が低くなるという課題があった。そこで、固有値解析を用いた空間解像度を固定しない空間–反射強度推定手法を導入し、読み取り成功率を向上させた。また、得られた空間–反射強度情報を含む点群をクラスタリングすることで、ノイズの多い環境下でもタグの位置を自動検出できる信号処理手法を開発した。実験の結果、壁や車、階段などの障害物が周囲にある状況でも高精度にタグを検知して読み取ることができることを確認した(図4)。
※4 FFT:高速フーリエ変換(Fast Fourier Transform)。時系列の信号の周波数解析を高速に行う手法としてよく利用されている。
各機関の役割
・ NTT:ミリ波レーダの信号処理手法の開発。固有値解析を用いた空間位置推定や点群クラスタリングによるタグの自動検知手法を確立。
・ 東京大学:RFIDタグの開発。コーナリフレクタの形状や配置方法の設計手法を確立。
ミリ波RFIDタグの誘導技術を用いたドローンの自律運用
今後ミリ波RFIDタグの誘導技術を用いて、暗闇や悪天候といった過酷な環境下におけるドローンの自律的な運用を可能とし、災害対応や海洋観測の高度化の実現を推進する。また、物流や医療などの幅広い分野でのパートナーとの連携を目指す。
最終的には、ドローンだけでなく多様なIoTセンサで構成される革新的な空のセンサネットワークによる未踏領域の情報把握に向けて、ハードウェアからソフトウェアまで最適化されたシステムを実装し、4Dデジタル基盤を強化することで超レジリエント社会の実現に貢献していくとしている。
論文情報
雑誌:The 29th Annual International Conference On Mobile Computing And Networking (MobiCom 2023).
題名:MilliSign: mmWave-Based Passive Signs for Guiding UAVs in Poor Visibility Conditions.
著者:Tatsuya Iizuka, Takuya Sasatani, Toru Nakamura, Naoko Kosaka, Masaki Hisada, and Yoshihiro Kawahara.
DOI:10.1145/3570361.3613264