ドローンの運行管理システム「UTM(Unmanned Traffic Management)」を中心に、陸上、水上、水中を含む無人機の社会実装に必要な施策や社会基盤整備のあり方を検討し、情報発信を行っている団体である「JUTM(Japan Unmanned system Traffic & radio management consortium:日本無人機運行管理コンソーシアム)」の第4回年次総会とセミナーが、7月3日に東京都文京区の東京大学大学院情報学環・福武ホールで開催された。
2015年に有志の「ドローン安全運行管理システム勉強会」として誕生したJUTM。2016年夏に設立された際のメンバーには、JAXA(宇宙航空研究開発機構)航空技術部門やNICT(情報通信研究機構)といった国の研究機関から、ANAホールディングス、NTTドコモ、日本郵便、日立製作所、SUBARU、ヤマトホールディングスといった、ドローンに何らかの関連を持つ企業が名を連ねている。
午前中にはJUTMが運用調整を担っている「無人移動体画像伝送システム」の最新状況の報告とデモンストレーションなどが行われ、午後に総会とセミナーが開催された。当初の座長であり、現在も代表を務める鈴木真二東京大学未来ビジョン研究センター特任教授の挨拶に始まったセミナー。内閣官房副長官補室の米山茂内閣参事官が最初に登壇し、今年6月に改定された「空の産業革命に向けたロードマップ2019」を説明した。

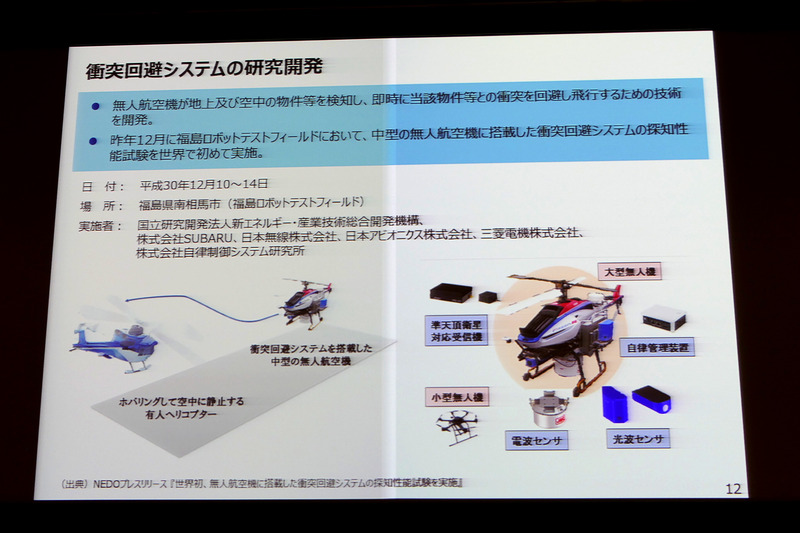
講演の冒頭で米山氏は「今年度改定の最大のポイントは、レベル4(有人地帯の補助者なし目視外飛行)を実現するという目標を“2022年度”と明記したこと」だと紹介。以前のロードマップではレベル4の実現を“2020年代前半”としていた。さらに米山氏はふたつめのポイントとして、“具体的な技術開発”を挙げる。「環境整備の中でレベル4に向けた総合的な検討を始め、本年度中に制度設計の基本方針の策定を行う」と述べ、その前提として、UTMシステムの実装技術の確立や衝突回避技術の小型化、省電力化といった実装的な技術の開発を進めていくとしている。

ただし、レベル4の実現といっても「いきなり人口密集地の上空を(ドローンが)飛び交うのは難しい」(米山氏)といい、「まずは人口密度の低い場所、軽量な機体、と難易度の低い所からサービスを開始したうえで、レベル4に突入してから、人口密度が高い、重量がある機体、多くの機体が同時飛行する状況といった高いレベルの飛行に移っていく。そのうえで空飛ぶクルマや航空機と共存する世界を目指していく」(米山氏)と述べた。
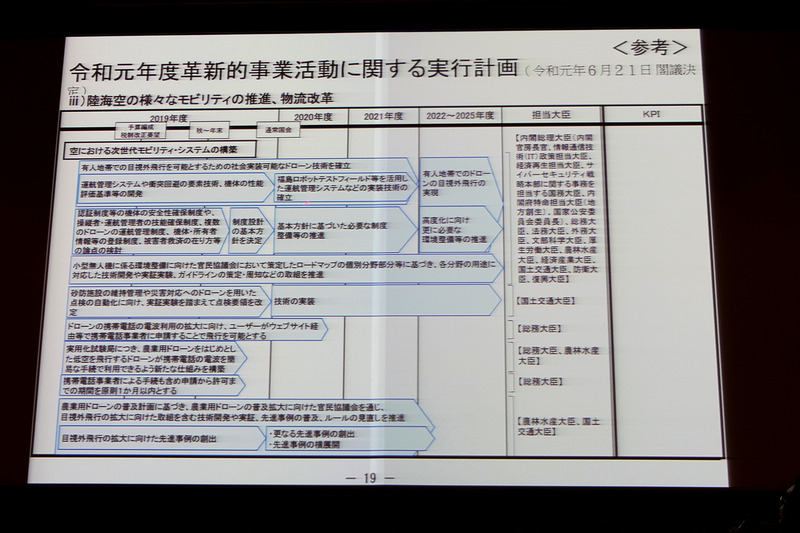
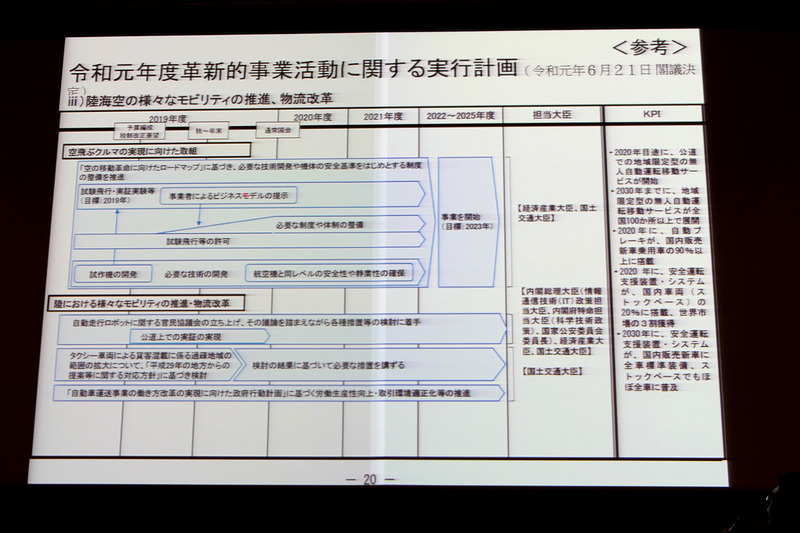
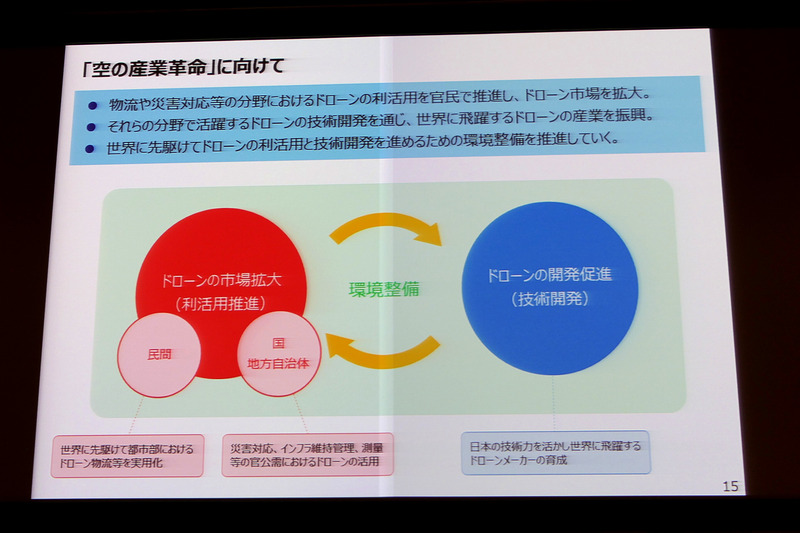
また、このロードマップが取りまとめられた6月21日には、「成長戦略実行計画案」が閣議決定された。その中では、「有人地帯の目視外飛行、自動運転やMaaSといった重点施策と並ぶ形でドローンが位置づけられており、また、成長戦略の工程表でもより具体的な目標が定められている。空飛ぶクルマの実現に向けた取り組みについてもドローンと並ぶ形で記載された」と米山氏は説明した。
今年度中に実用化試験局の申請を簡素化する
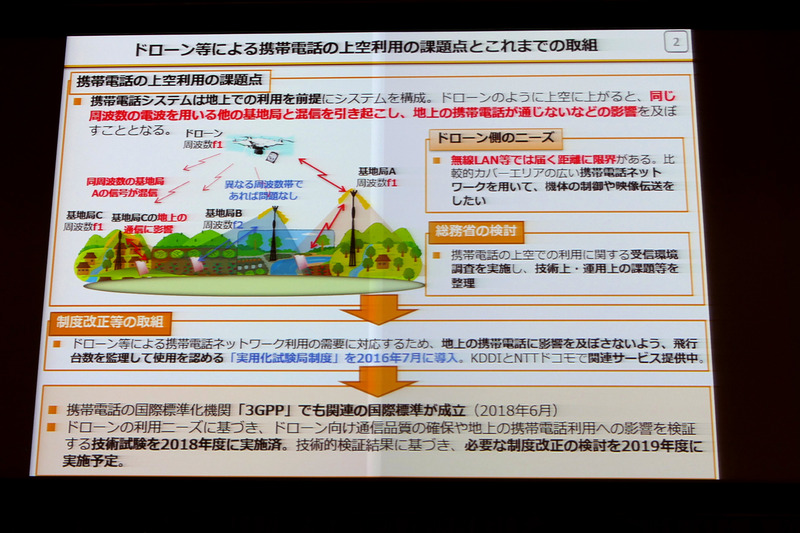
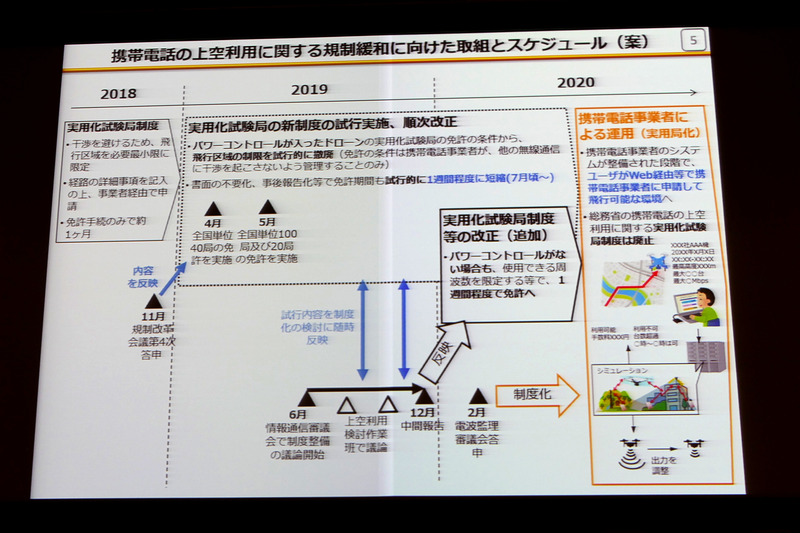
次に登壇したのは、電波行政をつかさどる総務省総合通信基盤局電波部移動通信課の石黒丈博課長補佐。「空の産業革命に向けたロードマップ」の中で総務省が取り組んでいるのが「携帯電話の上空利用」だ。石黒氏は「携帯電話の上空利用については昨年のロードマップと変わっていないが、やるべきことは着実に進めている」といい、その取り組みを具体的に説明した。

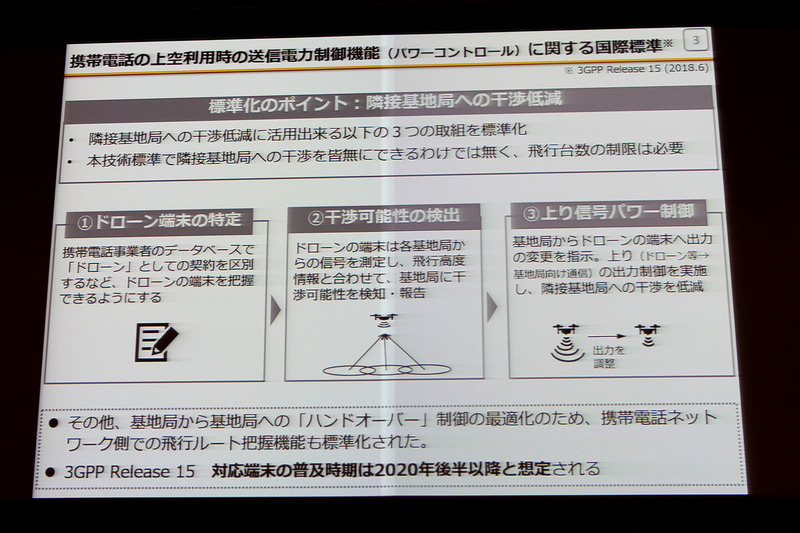
この携帯電話の上空利用については国際的にも議論がなされており、2018年6月に国際化標準機関3GPPで国際標準が成立し、日本において技術試験を2018年度に実施してきた。総務省としてはこの結果に基づいて日本国内の制度化を進めていくという。そのためにはまず「ドローンの端末を特定することが必要」(石黒氏)だといい、さらに「干渉回避の可能性の検出」「上り信号のパワー制御」が、標準化の中で求められている。そして、「この3GPPリリース15」による対応端末は、2020年後半以降にでてくるのではないかと期待している」と石黒氏は語った。
今後、携帯電話の上空利用という規制緩和のスケジュールについては、「昨年までは技術検証であり、今年度は審議会での議論を始める」(石黒氏)といい、「技術的な環境、無線設備規則や運用規則の改正を待たずに、ある程度状況も見えてきた。これまでは携帯電話事業者が実用化試験局を開局する際に、データを出していただいたりするなど、事細かくお願いごとをしてきたが、今後は簡素な手続きで実用化試験局を開設して検証ができる環境を今年度中に作る」と石黒氏は述べた。
あわせて石黒氏は「今後は情報通信技術分科会の中で技術基準がどうあるべきかを改めて検証して、できれば今年度中に技術基準に対する答申を行い、2020年2月頃に開かれる電波監理審議会の答申を経て制度化するという形で、2020年3月頃までを目途に我々は対応していきたいと考えている」と付け加えた。
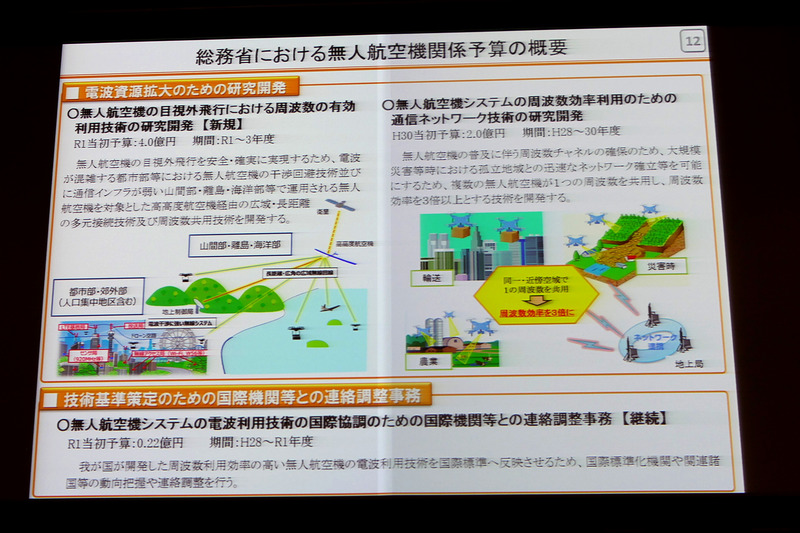
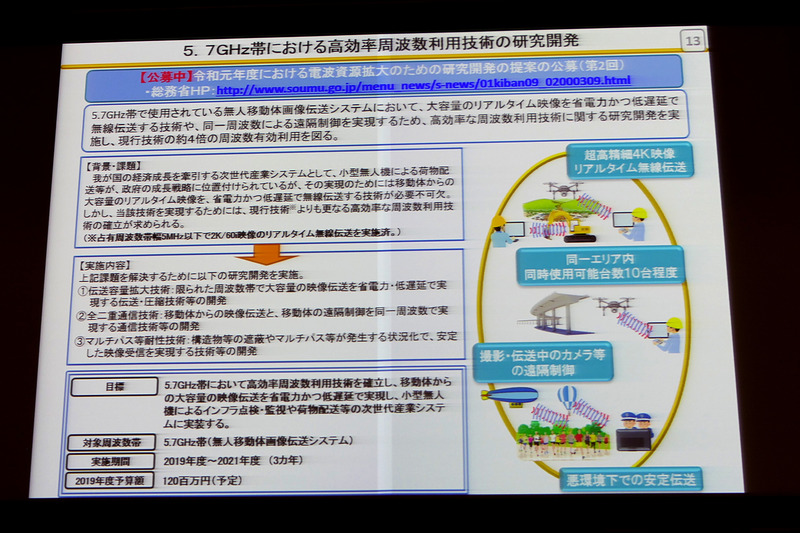
また、こうした携帯電話の上空利用が不可能な、携帯電話ネットワークのインフラがない地域において、目視外飛行を実現するために、人工衛星と高高度航空機による多元接続技術と周波数共用技術の開発を今年度から3年間かけて行うとし、4億円の予算を付けていると説明。さらに、現在5.7GHz帯に設けられている無人移動体画像伝送システムで、4Kの高精細な画像を10台同時に利用できるような技術開発の公募を行っていると紹介した。
「制度整備のためにドローンをこう活用したいという意見を出してほしい」
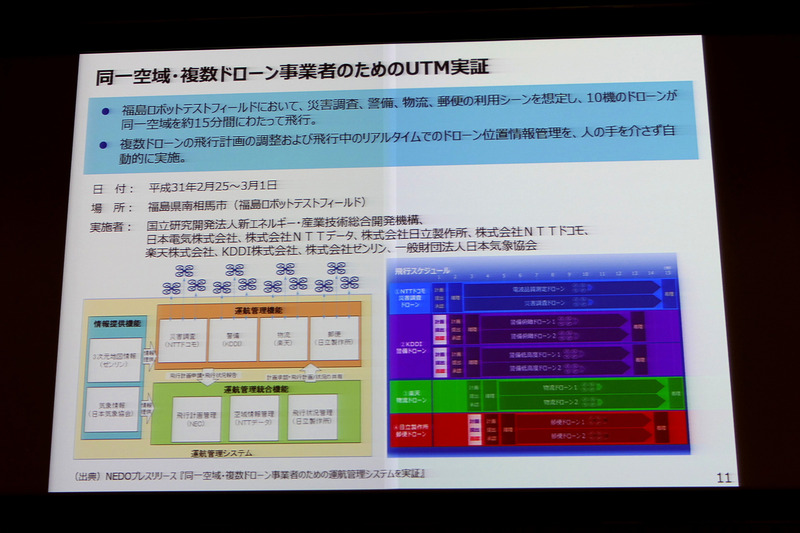
次に壇上に登ったのは経済産業省製造産業局産業機械課ロボット政策室の荒幡雅司国際調整係長。経産省ではNEDOを通じてUTMの開発を2017年度から3年間を目途に行っており、2019年度がその最終年となる。そのため7月26日には福島ロボットテストフィールドで「安全なドローン運航のための相互接続シンポジウム」が開催され、研究成果の発表が行われている。荒幡氏によると今後は実装に向けて2022年に向けて、技術開発を行っていくという。

「UTMは技術開発と制度整備が両輪になって進めているが、2022年にどこまで何ができるのかがぼやけているのが個人的な感想」という荒幡氏。「ドローンでビジネスを展開したい事業者にとっては、制度が整わないことにはなかなか取り組めないという、制度整備と取り組みのどちらが先に進むかという“ニワトリとタマゴ”の関係ではあるが、『飛行エリアや頻度がこれくらいで、こうやってビジネスをやっていきたいから環境を整えてほしい』という意見が出てくるほど、みなさんがやりたいことを叶える制度を整えられる」と話した。
2020年3月までに福島ロボットテストフィールドの施設が完成
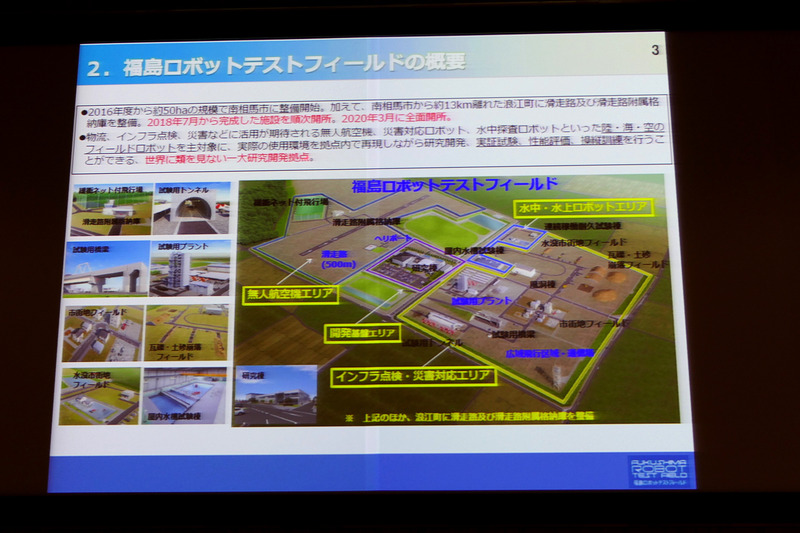
こうした日本のドローン開発の実証・実験の場として利用されているのが、福島県南相馬市に整備されている福島ロボットテストフィールドだ。公益財団法人福島イノベーション・コースト構想推進機構によって運営されるこの施設は、南相馬市の復興工業団地内に、東西約1km、南北500mという広大な敷地を擁するほか、浪江町の棚塩産業団地内に長距離飛行試験のための滑走路を整備することとなっている。

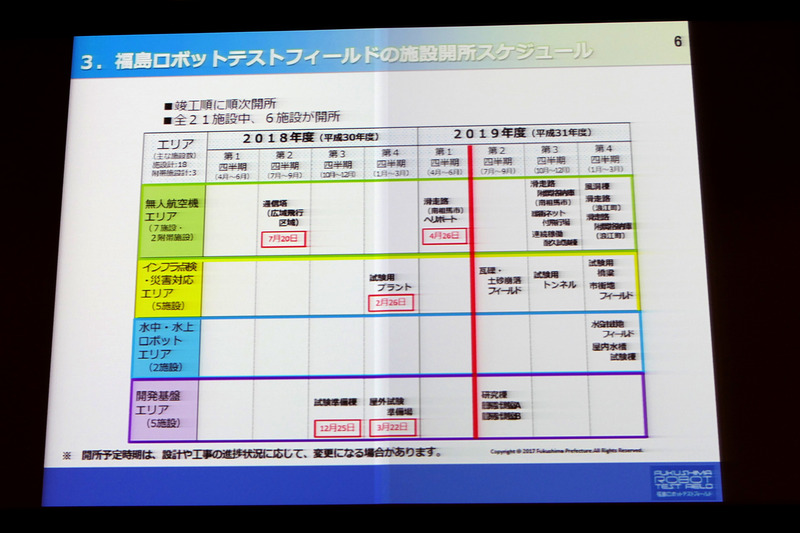
福島ロボットテストフィールド副所長の細田慶信氏は、2016年度から整備が進められている同フィールドの状況を説明。2018年度には通信塔と滑走路、試験用プラントが完成しており、今後2019年度内に南相馬の無人航空機エリアにある滑走路の格納庫や緩衝ネット付き飛行場、インフラ点検・災害対応エリアの災害現場を模したフィールドや試験用のトンネル、橋梁、水中・水上ロボットエリアの屋内水槽施設などが整備されることを紹介した。また、開発基盤エリアでは研究棟が間もなく完成。この研究棟は2階が貸し研究室となっており、13室のうちすでに9室に大学や民間企業の入居が決まっているという。
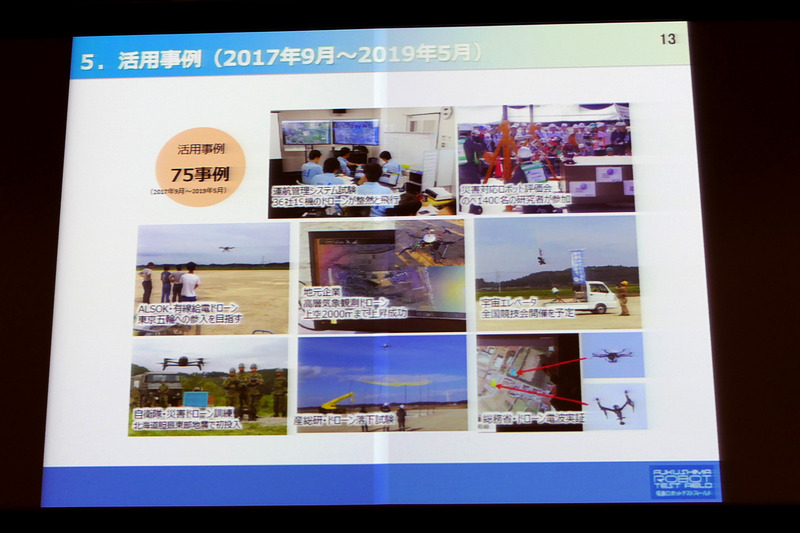
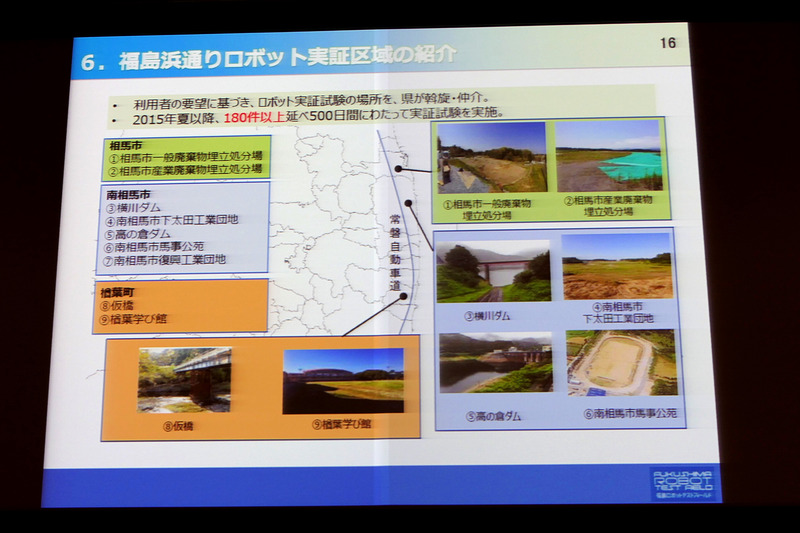
整備開始から3年間ですでに75の活用実績があり、JUTMをはじめJUIDAやJUAVといったドローン関連団体やドローン関連企業、さらには「ImPACTタフ・ロボティクス・チャレンジ」の評価会や自衛隊の災害ドローン訓練などでも活用されているという。また、細田氏によると福島ロボットテストフィールドだけでなく、「福島浜通りロボット実証区域」として、ロボット・ドローン関連企業や大学、研究機関のために、県内の橋梁やダム、山野などを提供する仲介を福島県が行っており、2015年夏以降、180件以上、述べ500日間に渡って実証実験などで活用されているという。「7月18日からは福島県南相馬市と東京を直通で結ぶ高速バス路線も開設され、さらに利用に便利になっている。ぜひ、福島ロボットテストフィールドを積極的に活用してほしい」と細田氏は訴えた。
UTMの国際標準化では日本が中心となって議論が進められている
JUTMはUTMをはじめドローンの技術や制度の発展を目的に、ワーキンググループ(WG)活動を行っている。そのひとつである国際標準化WGでは、日本でつくられたUTMの技術や制度を国際標準にするための取り組みを行っている。

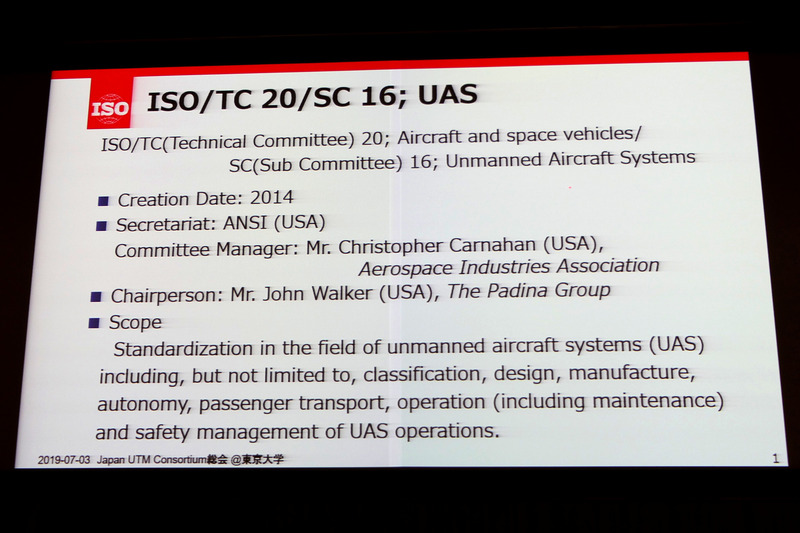
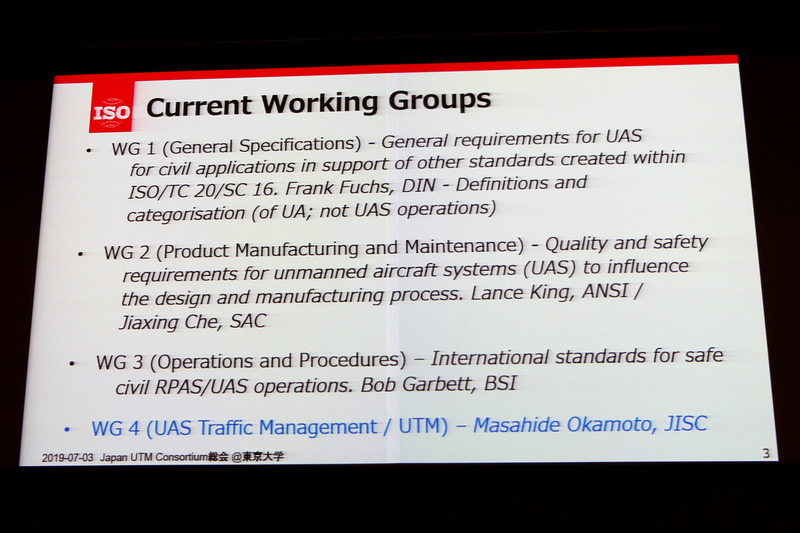
現在、ドローンもISO(国際標準化機構)の「ISO/TC(Technical Committee:航空機・宇宙船専門委員会)20/SC(Sub Committee:無人航空機システム小委員会)16」で、17か国とオブザーブメンバー6か国が参加して、標準化の議論が進められている。このSC16には4つのWGがあり、WG1は一般的要求事項、WG2はドローンのプロダクトそのものに対する要求事項、WG3は安全運行のための要求事項、そしてWG4はUTMに関する要求事項を議論している。JUTMではこのうちUTMについて議論するWG4に、JUTM国際標準化WG幹事の岡本正英氏が参加。「各WGは議長国の下で議論が進められており、WG1はドイツ、WG2はアメリカと中国、WG3は英国、WG4は日本となっていて、WGの議長国となることが、議論を主導するうえでも重要だ」と岡本氏は説明する。
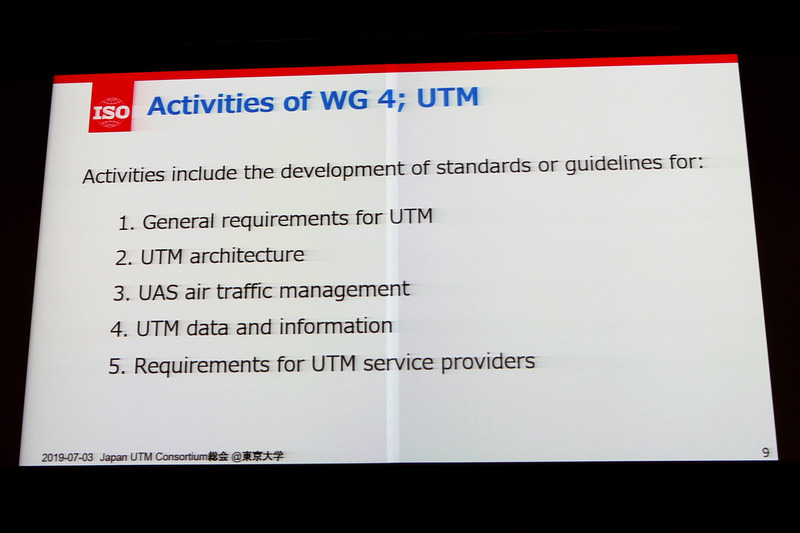
WG4では無人航空機の運行管理(UTM)の分野で、国際標準とガイドラインを確立することを目的にしている。WG4で議論が行われているのは「一般要求事項」「UTMのアーキテクチャ」「無人航空機の運行管理」「UTMのデータとインフォメーション」「UTMサービスプロバイダ」の5項目だ。有人航空機ではこうした運行管理などはICAOのレギュレーションで決まっていたが、ドローンは商用用途ということもとあってISOで標準化を進めている。「ただし、ICAO等を含む航空分野のオーソリティが提供するルールやガイダンスを無視することはできないため、これらと調整しながら標準化を進めていく」(岡本氏)という。
ISOではこうしたWGでの議論を踏まえて国際標準を作っていくが、岡本氏によるとすでに議論されている項目のほかに「UTMファンクショナルストラクチャー」「UTMサービスとサービスプロバイダの要求事項」と、日本提案の「リモートID」の3項目が新たに提案されて認められた。また、WGになっていないテーマとして「シンボルとピクトグラム」「試験」があったが、「試験」は新しいWGに昇格することとなったという。
岡本氏はこの昇格について「“試験”のWG昇格については、日本として反対を示した。もともと中国が提案した“試験”というWGができると、いずれUTMやUTMに関連する試験も「試験」というWGのテーマに含まれると主張され、UTMの領域も侵される可能性がある。ビジネスにおいて試験は認証につながることなので、この議長を取った国が最終的にSC16のすべてを支配することになりかねない。これから新しいWGのスコープが決まってくるので、新しいWGの内容に前提条件をつけるなどの取り組みを行っていく」と説明した。
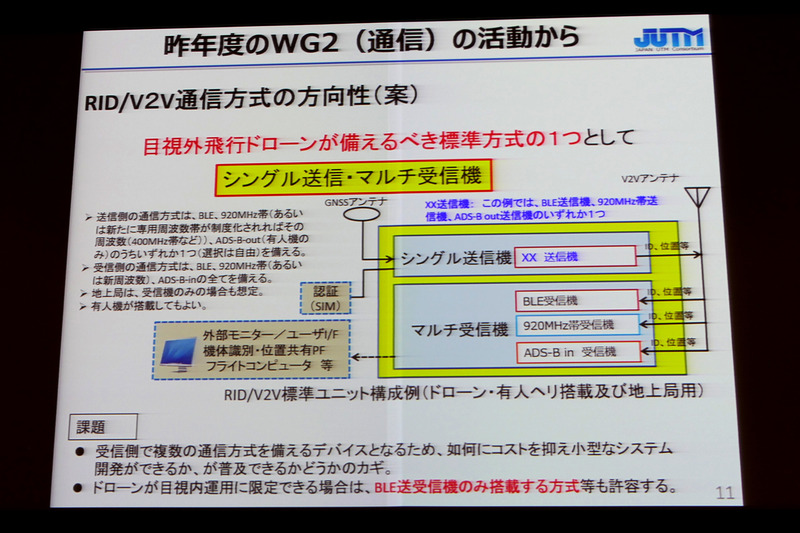
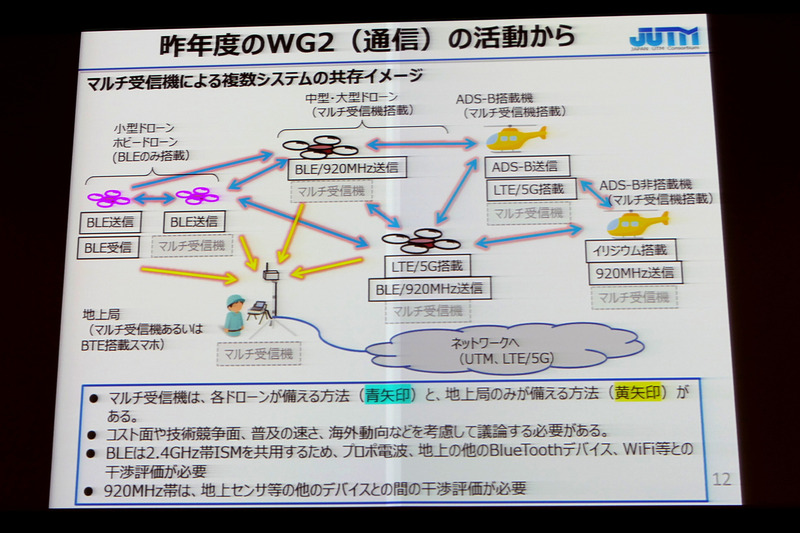
衝突防止のリモートIDの通信には「シングル送信機/マルチ受信機」を提案
セミナーではこのほか、国土交通省航空局安全部安全企画課の伊藤康浩専門官から飛行情報共有システムについての説明や、技術士の澤田雅之氏からはアンチドローンの技術動向について、また、特許庁審査第二部の諸星圭祐運輸審査官からは平成30年度の特許技術動向についての紹介があった。
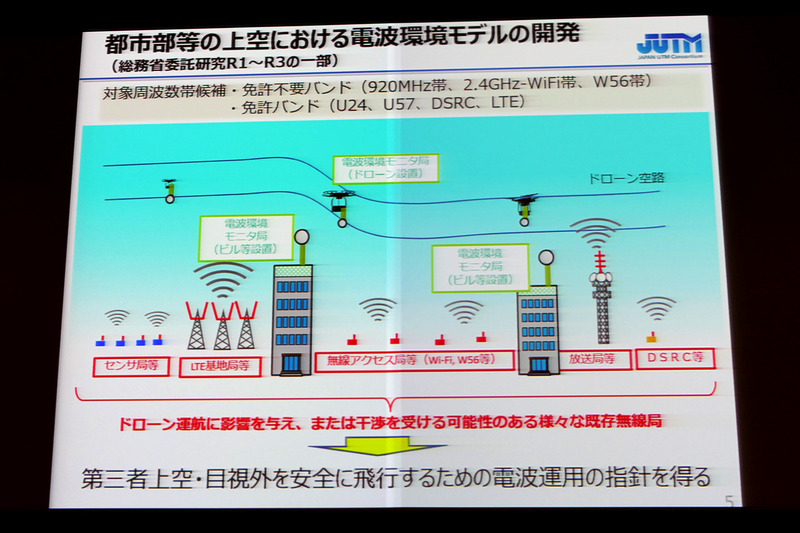
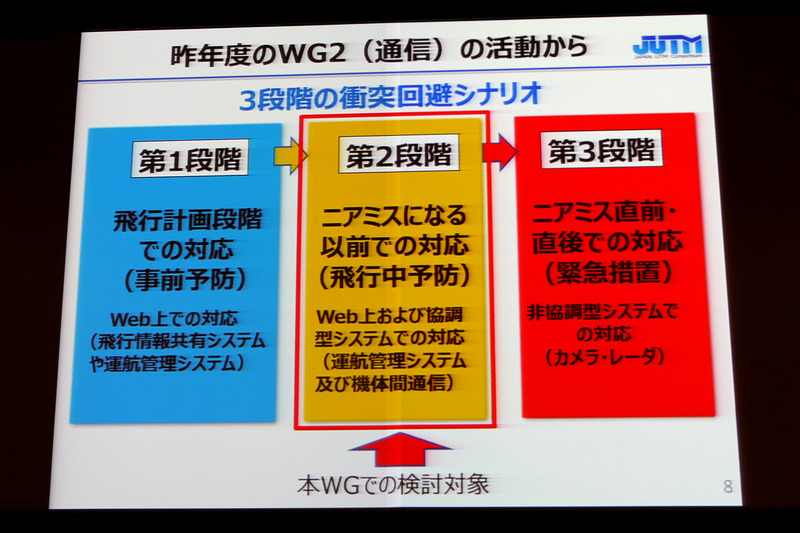
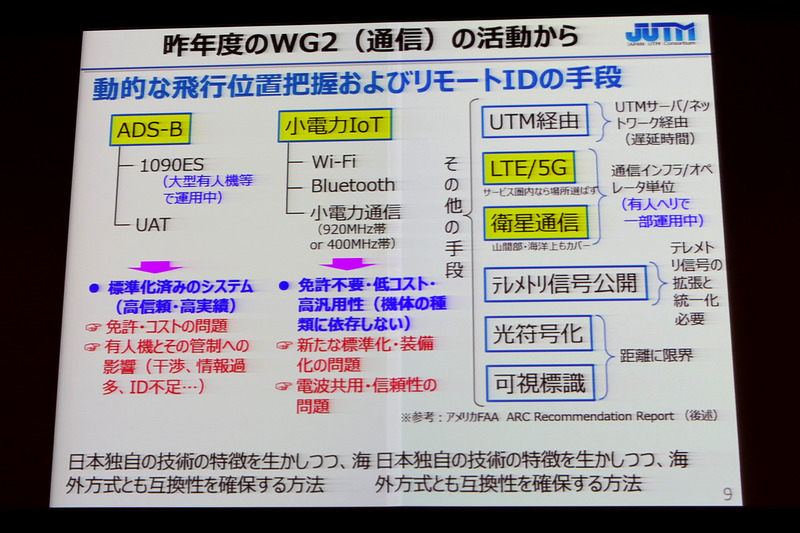
さらに、セミナーの後段ではJUTMの各WG活動についての報告が行われた。このうち、以前の通信(WG2)と運用調整(WG3)を統合した電波調整WGからは、三浦龍共同主査が報告を行った。この中では、第三者上空の目視外飛行を安全に行うために、都市部等の上空における電波環境モデルの開発や、動的な飛行位置把握とリモートIDの検討を行っていることを報告。特に衝突回避の手段としてUTMと合わせて、機体間通信の必要性を求めており、この通信にはADS-BやBluetooth、LTE/5Gといった携帯電話網を利用することを検討しているという。さらに、こうした通信方式を複数利用できる「シングル送信機・マルチ受信機」という方向性を提案している。

また、UTMの技術・制度開発に並んでJUTMの主な活動のひとつが、無人移動体画像伝送システムの運用調整だ。2017年度に新設されたこの無線システムは、169MHz、2.4GHz、5.7GHz帯に操縦用と画像・データ伝送用として空中線電力最大1Wの携帯局、陸上移動局として免許されている。ただし同じ時間帯、同じエリアで同じ周波数を利用すると混信して通信ができなくなるため、免許の条件として運用調整が求められている。この運用調整団体として指定されているのがJUTMだ。
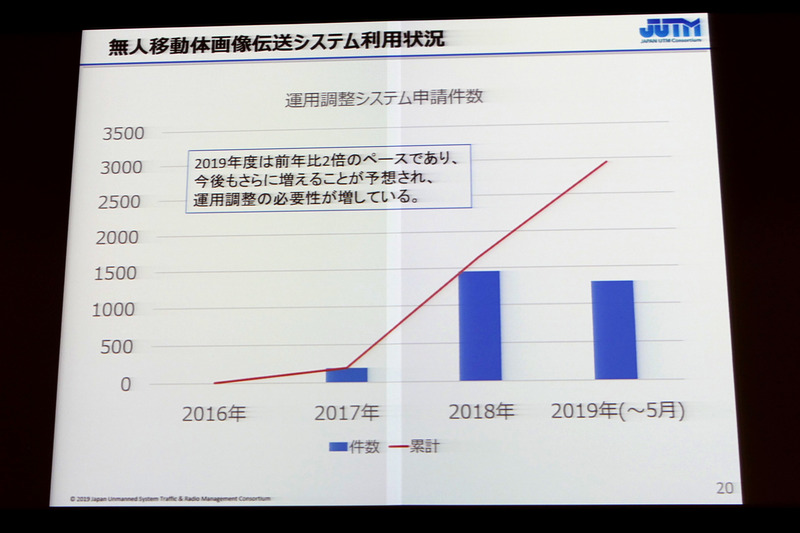
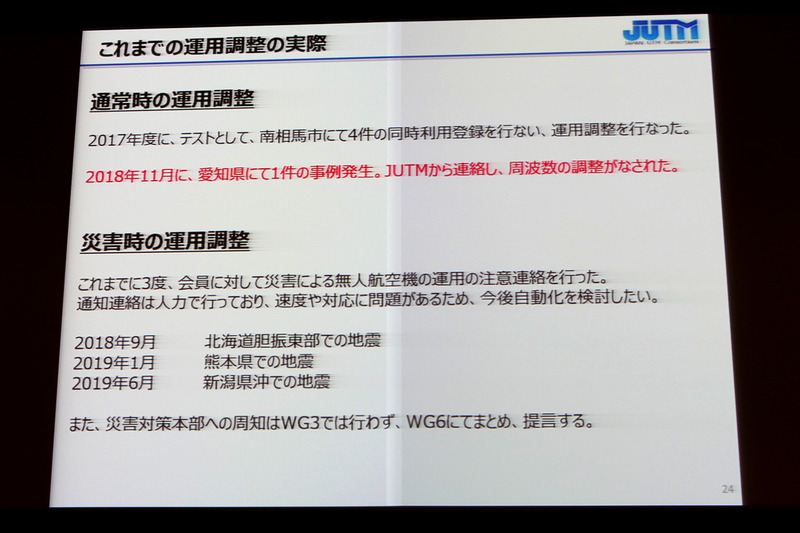
運用調整はJUTMの会員となることで、運用調整システムが利用できるようになり、無人移動体画像伝送システムの利用時は、このシステムへの入力を行うこととなっている。運用調整の実績としては、2018年11月に愛知県で1件発生し、周波数の調整が行われたほか、北海道胆振東部地震をはじめ大規模な地震の際に、会員に対して運用の注意喚起を行ったという。
※登壇者の情報は登壇時のものです。現在の情報とは異なる場合もあります。