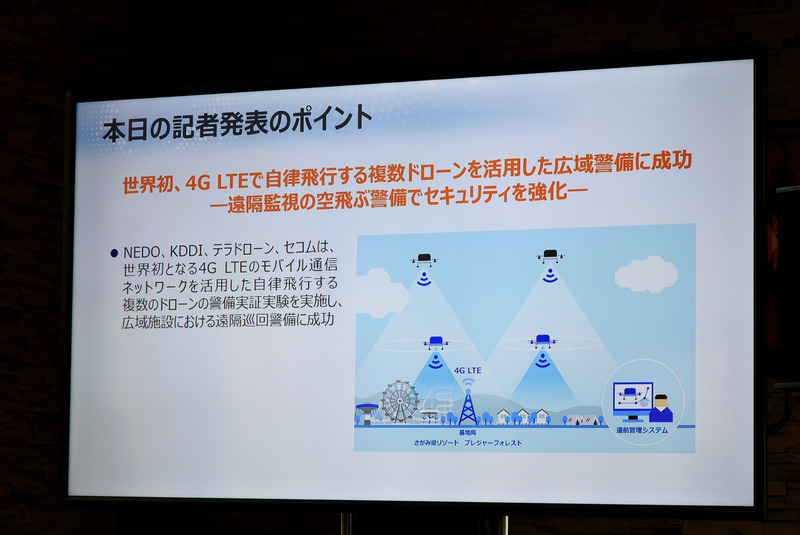
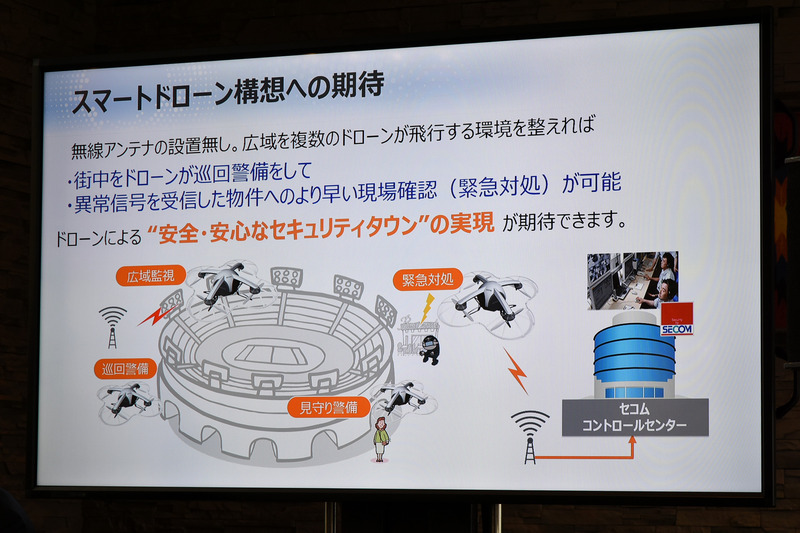
3月15日、KDDIとNEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)、テラドローン、セコムは、KDDIの4G LTEモバイルネットワークを使い、自律飛行する複数のドローンによる広域遠隔巡回警備の公開実験を報道陣に公開した。この実験はKDDIが推進する「スマートドローン構想」の実用化段階へのステップとして、レジャー施設のような広い面積の施設を複数のドローンを使って上空から警備するというものだ。
UTMが三次元空間で複数のドローンを同時に管制する

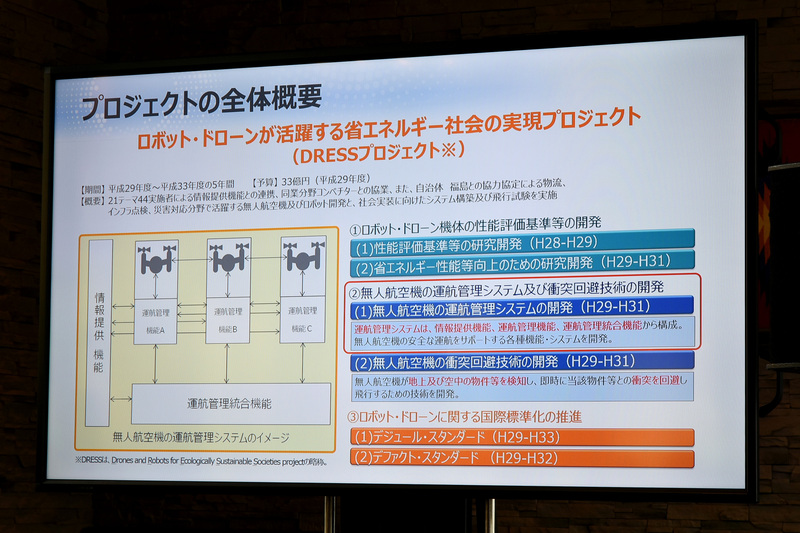
この実証実験の中心的な存在である運行管理システムは、NEDOが取り組んでいる「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト(DRESSプロジェクト)」という5年間のプロジェクトのうち、「無人航空機の運航管理システム及び衝突回避技術の開発」という2017年から3年間で開発が進められている成果の1つ。今回の実証実験は、その初年度の成果を示すもので、2019年の実用化を目指している。



この日の実験では神奈川県相模原市のレジャー施設「さがみ湖プレジャーフォレスト」で、あらかじめ決められたルートに従って4機のドローンが園内を飛行。2機が十数m~20m程度を巡回飛行するのに対して、残りの2機はさらに高い高度を飛行しながらより広い範囲を俯瞰する形で園内を撮影。その映像はKDDIの4G LTEモバイルネットワークを使い、施設内に仮設した警備室の運行管理システムに伝送され、施設内に設置された監視カメラと同様にモニター上に表示される。
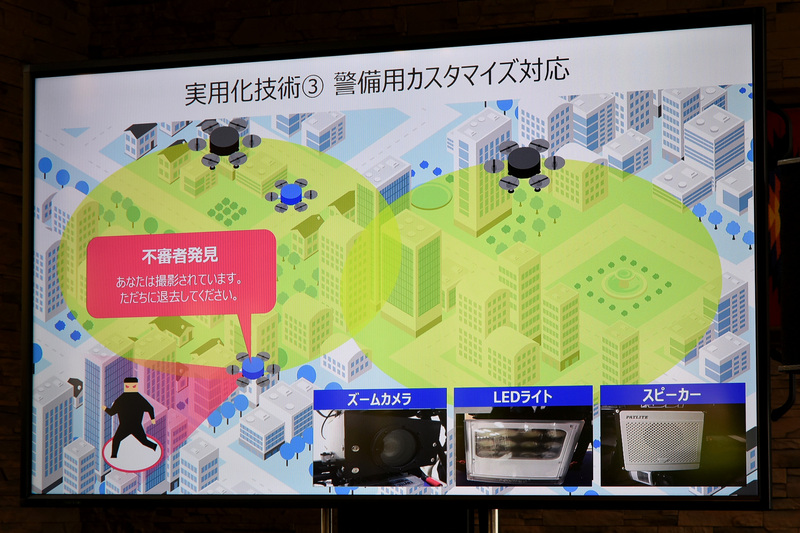
俯瞰ドローンが撮影した映像上に不審者を発見した場合、警備員は手元のタブレットで低い高度を飛ぶ巡回ドローンに対して、不審者の上空に移動するよう指示。巡回ドローンがその場所に急行すると、高倍率のズームカメラで不審者を撮影すると同時に、機体に搭載したスピーカーで威嚇し、不審者を排除するというのが、今回の実験のシナリオとなっている。
この実験でカギとなるのは、KDDIの4G LTEネットワークによる遠隔操作と映像伝送、テラドローンのUTMが高度差をつけて複数のドローンを同時に飛行させる運行管理機能だ。今回の実験に参加しているセコムでは、すでにドローンを使った侵入監視と巡回監視サービスを2015年12月から提供しているが、いずれもショッピングセンターや工場といったある程度範囲が限られた施設で、ドローンの映像伝送には無線LANを使用している。しかし、今回のさがみ湖プレジャーフォレストのようなレジャー施設はさらに規模が大きく、無線LANでは対応できない。そこでKDDIの4G LTEネットワークを使って、広い範囲を移動するドローンに対して、操作の指示やテレメトリーのデータ伝送、そして監視映像の伝送を行う。
現在、一般的にドローンの制御には2.4GHz帯(ISMバンド)が利用されるが、物流をはじめとした産業利用では長距離飛行が欠かせないものとなることを踏まえ、KDDIではそれに代えて4G LTEネットワークの利用を推進してきた。2017年4月には、日本で初めてLTEによるドローンの完全自律飛行実験に成功し、2017年11月には三次元地図とドローンポートを利用したLTE長距離完全自律飛行実験に成功している。今回の実験はその次の段階として、モバイルネットワークで複数のドローンを遠隔制御するというものだ。
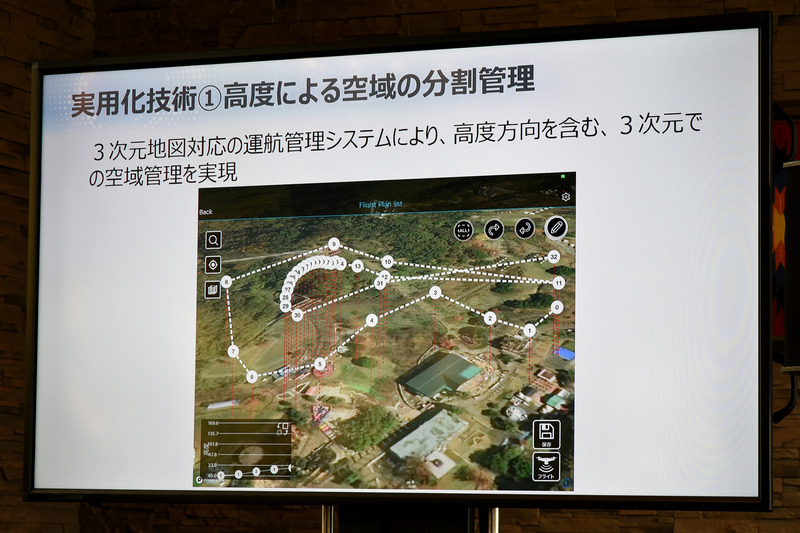
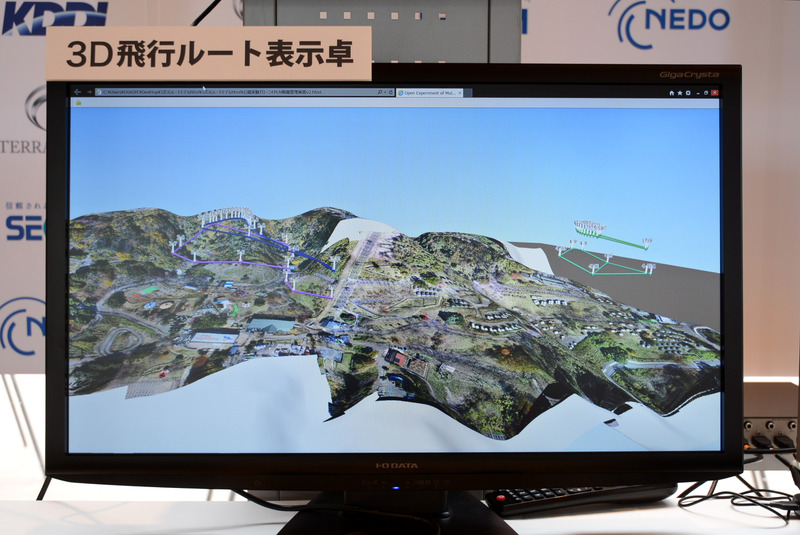
また、複数のドローンを同時に運行させるために、テラドローンの「TERRA UTM」をベースにした運行管理システムをバックボーンと利用している。とりわけ今回の実証実験でカギとなるのは、複数の機体の高度を変えて同時に運航するということにある。事前にドローンで撮影して作成した三次元地図をもとに高度を設定し、低高度を飛ぶ巡回ドローンと高高度を飛行する俯瞰ドローンのルートを設定。二次元で表現した地図上では巡回ドローンと俯瞰ドローンのルートは交錯しているが、高度差があるためもちろん衝突するようなことはない。この管制技術は実機では当たり前のことではあるが、UTMとしてはまだまだ新しく、今後物流などで複数のドローンが飛び交うようになると、必須となってくるであろう。
ドローンを使った警備というものがよりリアルに見えてきた
今回使用したドローンは、プロドローン製の機体(機種名等は実験機のため非公表)でKDDIのスマートドローン用にカスタマイズしたオクトコプターだ。巡回ドローンにはカメラのほかにLEDライト、スピーカーを搭載。俯瞰ドローンには高倍率のズームが可能な超高感度カメラを搭載している。いずれも機体と搭載機器を合わせた総重量は20kgを超える。この日は日中に園内に侵入した不審者を発見するというシナリオだったが、例えば夜間には俯瞰ドローンの超高感度カメラが不審者の発見に欠かせないほか、巡回ドローンのLEDライトが発見した不審者を明るく照らし出してくれる。また、搭載カメラとしては赤外線カメラも選択肢として用意されているという。




この日の実証実験は大勢の関係者や記者が集まっており、当然のことながら来場者が持っているスマートフォンなどが4G LTEネットワークに与える負荷は小さくはない。デモ前に各自のスマートフォンを航空機モードにすることが呼びかけられてはいたが、デモ中には幾度となくドローンからの映像が途切れることがあった。これについてKDDIとしては、「現在は4G LTEネットワークを利用しているが、いずれはより高速大容量の5Gネットワークを利用することで、こうした問題も解決できる」という。
また、今回は俯瞰ドローンから運行管理室に送られてきた映像を監視員が見て不審者を見つける、という形になっているが、いずれは画像認識技術などを使って監視やドローンによる追尾を自動化することも視野に入れている。さらに、現在はドローンの飛行時間はおよそ10分程度だが、これは「今回の機体が約20kg以上の総重量となっているためであり、いずれ機体の開発が進めば20分、30分以上の飛行が可能なことはすでに検証済み」だという。また、ドローンで巡回警備を行う上では、原則として長時間滞空することが必要となるが、そのためには充電式のドローンポートを利用することを想定しているという。
さらに、今回の実証実験の自律飛行、つまり目視外飛行は、俯瞰・巡回ドローンの飛行中、報道陣関係者が園内のレストラン内にいることで、無人地帯の上空飛行という状況を作り出している。しかし、今後想定されているドローンによる巡回警備は、閉園後の入場者がいない状態だけでなく、入場者がいる状態での飛行を前提としたものだ。そのため、「最終的には当局による有人地帯上空の目視外飛行が当局によって認められることが条件となる」という。
この日公開された実験は、まだあくまでも実験段階ということで、通信品質の問題や、ドローンの飛行時間、さらには映像を通じた監視体制、そして有人地帯上空の目視外飛行といった様々な課題を残している。しかし、敷地全体を俯瞰しながら監視するドローン、そしてトラブルの場所に警備員より素早く急行して対処をする巡回ドローンと、複数の機体を目的に合わせて飛行させるという、より具体的なドローンの活用方法を社会に示す形となった。とりわけ警備業は2020年の東京オリンピックで欠かすことのできない存在であり、昨今の人手不足もあってドローンによる警備が社会実装される契機となることは間違いない。あわせて、ドローンによる長距離輸送といったテーマでは、盛んに議論に上がるUTMをそういった“線”の移動のためというより、それより狭いながらも“面”の中、それも高度の違う空路の”レイヤー”を同時に管制するという、また新しいUTMの姿を示した今回の実証実験となった。