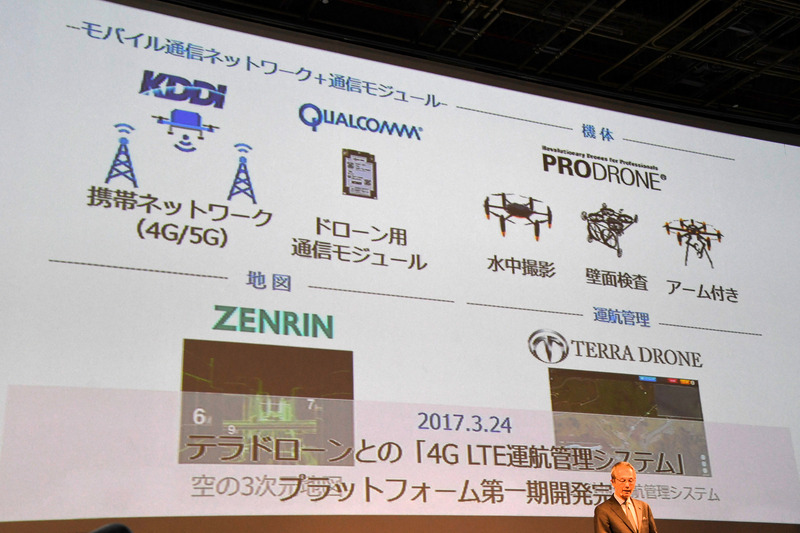
11月29日、KDDIは同社が推進する「スマートドローン構想」の一環として、世界で初めてモバイル通信ネットワークと三次元地図を活用した完全自律飛行に成功したと発表した。東京都内で開かれた会場で開かれた発表会では、本プロジェクトに参加するゼンリン、プロドローン、テラドローン、そして新たにアライアンスに加わったウェザーニューズとともに、その成果と将来について披露した。
KDDIのスマートドローン構想第一段階の集大成

本プロジェクトの最新の実証実験は、11月13日、14日の二日間、新潟県長岡市の山古志地区で実施された。この山古志は錦鯉発祥の地として錦鯉の養鯉が盛んな地域で、養鯉の作業の中では小まめな給餌や寄生虫除去のための薬剤散布といった作業が農家の負担となっている。今回の実証実験ではこの養鯉が行われている棚池に、空中から薬剤を散布するという作業をスマートドローンが担うというものだ。

プロドローンの「SkymatiX X-F1」をベースに製作された、KDDIのスマートドローン実証機。KDDIのモバイル通信ネットワークを使って自律飛行を行うほか、ドローンポートに画像認識で着陸して、写真上で金色に光るパッドから電力を受ける形で充電を行うことが可能。
実験は養鯉池から離れた離発着場から約2.6kmを飛行して、棚池に近いドローンポートにいったん着陸。ドローンは自動で充電を行い、再び離陸して棚池に向かい、高度約3mで薬剤を散布し、再びドローンポートを経由して戻ってくるという、総距離約6.3kmの長距離飛行を行うというもの。

本実験で注目すべきポイントは、長距離飛行の途中、ドローンポートで充電を行うということがひとつ。プロドローンが開発した画像認識による自動着陸機能により、充電パッドの上に正確に着陸して充電を行ったということ。また、山古志の養鯉池は山間地の斜面に設けられた棚池となっていることに加えて、離発着場からのルート上には100m以上の高低差がある。そのため、地形はもちろん、建物や樹木の高さなども含んだゼンリンの三次元地図情報をもとに、安全な高度を保ちながら飛行したという。

山古志地区の山間を飛行するルートは高低差が約100m以上あり、また斜面に設けられた棚池では高度3mを保って飛行するという高度なミッションの実現は、ドローン用の三次元地図データによるところが大きい。
KDDIでは今回の実証実験の成功を踏まえて、今後は鉄道災害時の想定実験や、自身のような災害をはじめとした自治体の課題解決に、そのほか道路の検査や警備といったジャンルでの実証実験を行っていく予定だという。
「ドローンは気象観測機器」。スマートドローンに参画の4社代表がパネルディスカッション
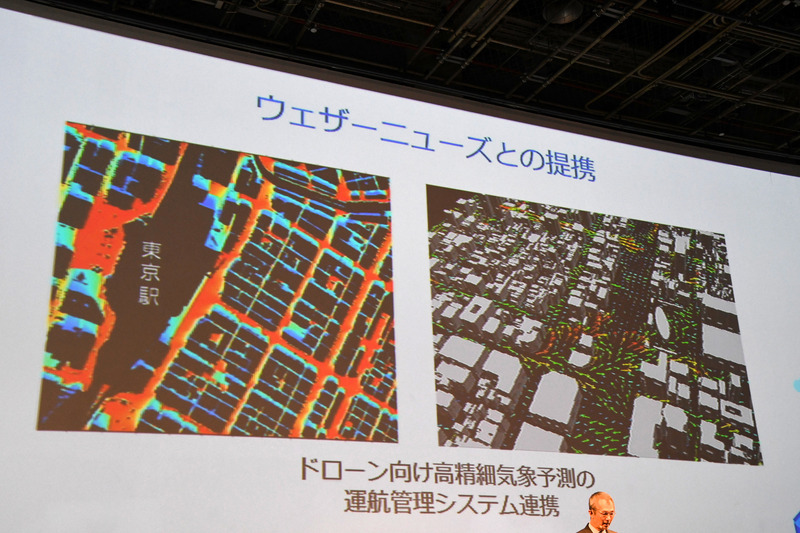
また今回の発表会では、KDDIのスマートドローン構想で業務提携を行っている、三次元地図を提供するゼンリン、ドローン機体メーカーであるプロドローン、運航管理システムを提供するテラドローンに加えて、新たにドローン向けの気象予測情報の提供などを行う気象情報会社ウェザーニューズが参画したことが発表された。KDDIでは全国32万局に設置された基地局の内、約3000局にウェザーニューズの気象観測システム「ソラテナ」を設置するなど、両社の提携関係はすでに長い歴史がある。こうしたソラテナをはじめとしたウェザーニューズの観測網と気象予測情報を、スマートドローンの運航管理システムに実装。飛行予定ルート上の突風や豪雨、霧といった気象条件を把握した上で、飛行と着陸の可否、さらにはルート変更といった対応が可能となり、より安全なスマートドローンの自律飛行を実現できるという。
発表会の後半にはこのウェザーニューズの石橋知博執行役員のほか、ゼンリンの藤沢秀幸上席執行役員、プロドローンの菅木紀代一取締役副社長、テラドローンの徳重徹代表取締役社長と、KDDIの山本泰英執行役員常務によるスマートドローンについての今後の課題と可能性をテーマにパネルディスカッションが行われた。
この中では、三次元地図、機体、管制システム、気象情報という、それぞれの立場からの意見交換が行われた。この中でゼンリンの藤沢氏は、「三次元地図の3Dのモデリングデータは、気流の変化といったシミュレーションにも有効だ。そこにドローンから得た気象情報を統合することができれば、さらに安全に飛ぶ仕組みを提供することができる」と気象情報の活用に期待を膨らませる。
気象情報を提供するウェザーニューズの石橋氏も、「気象に国境はなく、我々は全地球レベルで捉えている。ドローンが飛ぶ空にも国境がなく、全世界を飛んでいる無数のドローンから得た情報を集めることで、全世界の天気予報の精度が格段と上がる。我々にとってはドローンが観測機にしか見えない」と、気象情報を扱う立場からドローンに対する新しい視点を語った。

ドローン向けのUTMを開発するベルギーの企業ユニファイの筆頭株主でもあるテラドローンの徳重氏はグローバルな視点でドローン開発の必要性を訴える。「ドローンの開発はスピード感と世界的な視点が重要だ。日本ではどうしても規制がネックとなる。その一方で実は技術面では十分日本も進んでいる。そこで、ドローンが国の発展のためにドローンへの期待が大きな新興国で飛行実験を繰り返して開発を進め、並行して日本の規制緩和を進めると、日本でもドローンが活用しやすい環境を早く整えることができるのではないか」と語った。

機体メーカーであるプロドローンの菅木氏は、機体の安全性は今後どう進化していくのか?という問いに対して次のように答えた。「3年程前からドローンがいったいどうやったら落ちるのか、ということを検証した結果、現時点で75項目程度の落ち方を実証することができている。ドローンは空を飛ぶ以上、問題があると落ちる可能性もあるため、自律飛行を行う際にはコース直下に万が一落ちても、大事に至らない場所を選ぶことが重要だ。そのため、UTMなどでコースを作成するには緊急着陸場を考慮したコース設定を行う必要がある」という。
また、今回の実証実験でもドローンポートでの充電がカギとなっているが、やはり技術者としてドローンの充電に関心があるという。「非接触充電のような技術がドローンに生かせれば、飛行時間を伸ばすことができる。クルマなら道路を走りながら充電する技術もあるというが、すでに30m離れても充電できる技術が実験されているなど、ドローンもそういった充電の方法がかわることで、ドローンのあり方も大きく変わる」。