東京湾上空でドローン物資輸送の可能性を探る実証実験
2025年2月14日、東京湾にかかるレインボーブリッジ周辺の海上を舞台に、レベル3.5飛行によるドローン物資輸送実証実験が行われた。東京湾におけるレベル3.5飛行は初の事例となる。東京都港区の新技術実証実験プロジェクト「みなと新技術チャレンジ提案制度」の一環として、災害時の輸送路寸断を想定して行われた物資輸送の取り組みの模様を紹介する。
港区では区政の業務課題解決のため、ドローンやメタバース、生成AIなどの区で活用が進んでいない新技術の導入を目指している。「みなと新技術チャレンジ提案制度」では区のニーズと、これら新技術を持つ民間事業者をマッチングし、区内をフィールドとした実証実験などを通じて、公共サービスの向上に貢献するサービスの創出を目指している。2024年8月から9月にかけて募集を受け付け、全体で22件の応募があり、5件が採択された。

ドローンスクール東京グループを運営し、港区台場に「ドローンスクール東京お台場本校」を構えるハミングバードは「震災等被災時における台場地域や高層建物屋上へのドローンによる緊急物資輸送」を提案。2024年11月に採択され、今回の実証実験を行う運びとなった。
震災時の輸送路寸断を想定したドローン活用の意義

2月14日の実証実験ではこのうち「台場地域へのドローンによる緊急物資輸送」が行われた。港区は東京区部の中央~東南部に位置し、東京湾に面する。台場地域は東京湾を隔てた対岸に位置し、直接アクセスする陸路はレインボーブリッジのみである。つまり、震災等によってレインボーブリッジが寸断された場合、台場地域は孤立地帯に陥ってしまう。台場地域といえば有数の観光スポットであるとともに、地域を構成する台場1丁目・2丁目には2025年2月現在で5526人が住む。発災時における来訪者や住民への必要物資の輸送方法の確保は喫緊の課題といえる。

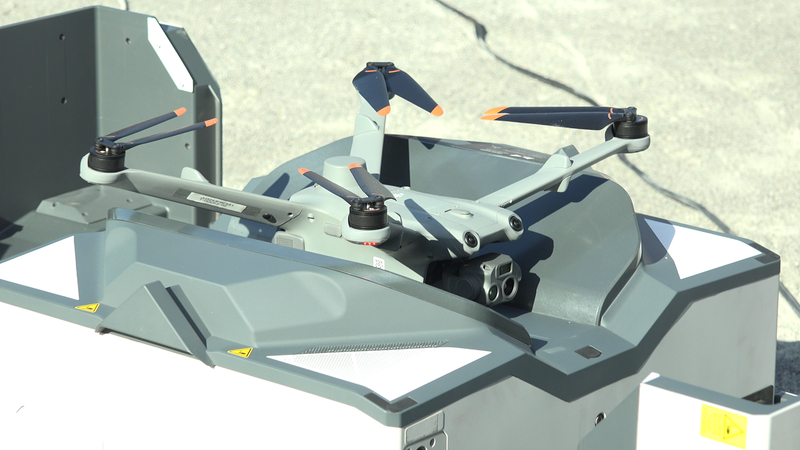
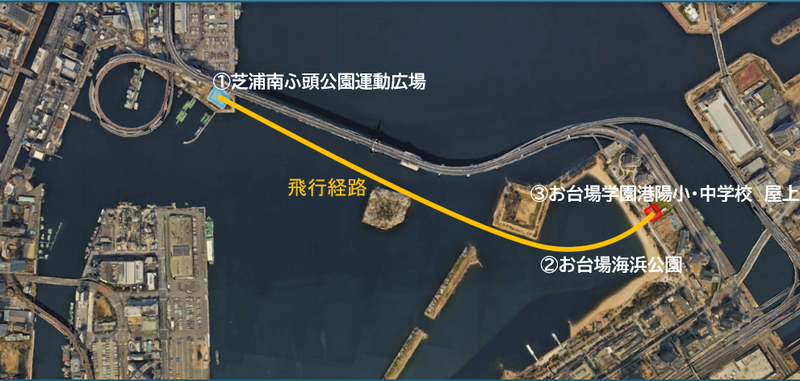
「台場地域へのドローンによる緊急物資輸送」では、レインボーブリッジの真下にあり、東京湾を臨む芝浦南ふ頭公園運動広場と、お台場海浜公園に面するお台場学園港陽小・中学校 屋上を結ぶ1.8kmの飛行経路を設定。1回目の飛行では、芝浦南ふ頭公園運動広場に設置された「DJI Dock 2」から「DJI Matrice 3TD」が飛び立ち、飛行経路の状況を確認。2回目の飛行で「DJI Matrice 350 RTK」が点滴パッケージを搭載して飛行し、お台場学園港陽小・中学校 屋上に設けられた着陸地点まで届けるという内容で行われた。Matrice 3TDによる飛行経路の確認という手順は、実際に災害が起きた場合に大型機をいきなり飛ばすのではなく、まずは小型機による確認を行うことを想定しているため、取り入れられている。

快晴の東京湾で行われたドローンフライト
雲ひとつない快晴のもと、実証実験が開始された。ドローンの飛行を妨げるような風も吹いていなかった。筆者はお台場学園港陽小・中学校 屋上からドローンの到着を見守った。芝浦南ふ頭公園運動広場側とは運営スタッフが無線で常時やり取りを実施。ちょうど東京湾を多くの船が航行する時間帯だったようで、航行の切れ目を狙い、1回目の飛行がスタートした。

離陸したMatrice 3TDは高度18mでレインボーブリッジに沿って巡航。その様子を確認しようと試みるが、機体の姿を捉えるのは困難で、お台場学園港陽小・中学校前に設けられた海上のホバリングエリアで発見できた。その後Matrice 3TDはもと来た飛行経路を引き返していき、往復約9分の飛行で、経路上に問題がないことを確認できた。
2回目の飛行も船の航行が途絶えるタイミングに実施。500g程度の点滴パッケージを積んだMatrice 350 RTKが離陸し、高度48mで巡航に入った。やがてビルやタワーマンションをバックに東京湾上を飛行するMatrice 350 RTKが望遠レンズ越しに確認できた。お台場海浜公園前の湾内に入ると機体がしっかり目視でき、周囲の見学者からも歓声が上がる。


湾内から着陸地点であるお台場学園港陽小・中学校。屋上にもアプローチするためには道路を横断しなければならない。数分に1回程度自動車や路線バスが通過する交通量だが、ドローンが道路上空を横断する際には、一時的に道路を封鎖して対応した。こうして約6分のフライトを終えたMatrice 350 RTKは校舎屋上に着陸。積み荷である点滴パッケージにも何ら影響がないことを確認できた。点滴パッケージを降ろして身軽になったMatrice 350 RTKは、再び芝浦南ふ頭公園運動広場に飛行して帰っていった。


1人操縦の運用体制と通信技術の工夫

実証実験終了後、ハミングバードの鈴木代表が取材に応じた。今回の実証実験は1人の操縦者がプロポを持ち、操縦を担当した。操縦者から見通しがきかない場所を飛行することから、機体とプロポ間の通信にはLTE通信を使用。離陸地点と着陸地点にそれぞれ操縦者を配置し、途中で操縦権を受け渡す、いわゆる「2オペ体制」も検討したというが「実際に災害が起きた際、着陸地点側にも操縦者がいるという状況は考え難い。そこで、今回は離陸地点側で1人で操縦する体制を採用しました」と鈴木代表は説明する。なお、実際には着陸地点となったお台場学園港陽小・中学校屋上に操縦者を配置しており、緊急時に対応できる体制を取っていた。
飛行時の操縦方法について、1回目のMatrice 3TDは離着陸含めて全区間で自動操縦となった。一方、2回目のMatrice 350 RTKについて離着陸時は手動操縦、東京湾上を飛行する場合は自動操縦と使い分けられた。このような運用方法になった理由として、前述した通りMatrice 350 RTKは道路を横断する飛行が含まれていたため「安全確認を確実に行うためにも手動操縦を取り入れる形になった」と鈴木代表は話す。


今回の実証実験では、機体からの映像が途絶する状況が起きていた。また「レインボーブリッジや周囲の重機等の影響を受けたのか、機体のセンサーエラーも生じており、ドローンが飛行するには厳しい環境下でした。そのため当初想定していたルートの微修正も行いました」と鈴木代表は振り返る。レインボーブリッジ上だけでなく、海上に船も出し、総勢10人の補助者体制で臨んでいたといい、運航関係者がつねに機体を目視できる状態を保っていたのだ。
東京湾は船の往来が多く、ドローンの飛行には複雑な調整が求められる。一方で、震災等を見据えてドローン航路の開拓も進めなければならない。今回の実証実験は、困難に思えるこの2つの課題の解決に向けて正面から取り組んだ、意義のあるものになったといえるだろう。