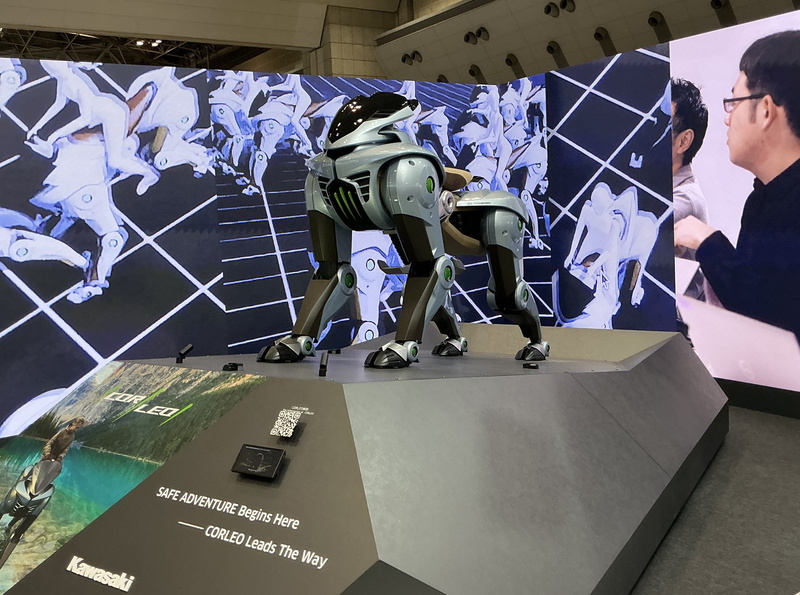
2025年の大阪・関西万博で初公開され話題を呼んだ川崎重工の4脚搭乗型ロボット「CORLEO(コルレオ)」が、ついに本格的な製品化へと動き出した。CORLEOの発表は、SNSで累計12億リーチという世界的な反響を生んだと川崎重工は発表し、未来のモビリティとして大きな注目を集めている。そして今、同機は“夢の乗り物”から“現実のプロダクト”へと転換するフェーズに突入している。川崎重工は2035年の製品化を目指し、専任開発チームによる量産化に向けたプロジェクトを始動した。
川崎重工が次世代モビリティの本格開発に着手——2035年製品化へ
川崎重工は2025年の大阪・関西万博での展示を起点に、CORLEOの実用化・製品化に向けた開発を本格的にスタートさせた。SAFE ADVENTURE事業開発チームを社長直轄で立ち上げ、2030年に開催されるサウジアラビア・リヤド万博の会場内でのモビリティ採用を視野に入れ、2035年の量産開始と市販化に向けたロードマップを明確に描いていることを発表した。
▼新感覚オフロードパーソナルモビリティ「CORLEO」の開発に着手
https://www.khi.co.jp/pressrelease/detail/20251203_1.html
開発過程ではライディングシミュレーターの構築も進められており、2027年を目処に完成を目指す。ここで得られた3Dモデルやモーションデータは、将来的にeスポーツやゲーム業界への展開も計画されており、実用とエンターテインメントの両軸で社会実装を見据えている。
人が操縦する“人馬一体の四脚ロボット”という新しい価値
CORLEOは、ロボティクスとモーターサイクル技術の融合によって誕生した次世代オフロードパーソナルモビリティである。その設計思想は従来のロボットとは異なり、移動ツールとしての自律性よりも、搭乗者が“体の延長”のように直感的に操縦することを重視している。

搭乗者はオートバイのようにスロットルやレバーを用いるのではなく、体重移動によってCORLEOを操作する。まるで乗馬のような感覚で、前傾すれば加速、横に重心をずらせば旋回するという直感的なインターフェースを採用。これを支えるのが、CORLEOに搭載されたAIによるリアルタイム重心検知と姿勢制御技術である。

実際に取材した際、担当者は「これは自動運転のロボットではなく、人が乗って操作する“モビリティ”として開発しています。オフロードをアクティブに楽しむ人向けの乗り物として、新しい体験価値を提供することを目指しています」と語った。
また、「ライダーの体重移動や姿勢の変化を通じて、前進や加速などの挙動を制御するライディングシステムを構築中で、動物を乗りこなすような感覚、自分の手足のように操作できることを目指しています」と語り、その操作体験は従来のバイクや車とは一線を画している。今回発表されたサウジアラビア・リヤド万博での採用は、砂漠というオフロードでの移動という国特有の環境と合致した結果だろう。
ライオンの骨格に学び、水素エンジンが生む革新
CORLEOの脚部構造は、ライオンの脚を模した骨格構造となっており、高低差のある複雑な地形や垂直に近い岩場でも高い走破性能を実現。脚先にはラバーパッド型の“蹄”を装備し、泥や砂利、岩場といった不整地でも安定したグリップ力を発揮することで柔軟に対応できる。
動力は水素エンジンを使用した150ccクラスの発電機により電気を生成し、これを脚部の各モーターに供給する。これにより、次世代に必須とされるCO2を排出しないクリーンな駆動に加え、静音性・高トルク性能を両立する。
この技術について担当者は、「今は電動モーターを基本としていますが、開発段階で必要に応じてアクチュエーター等への変更も検討しています」と説明し、柔軟性と実現性の両立が図られている。また、「モーターサイクル技術で培ったスイングアーム構造を後脚に応用しています」と説明し、これにより路面からの衝撃を吸収し、搭乗者の姿勢を安定的に保つことを可能とした。
冒険を身近に感じさせる山岳移動、安全走行支援の活用分野

CORLEOの開発は、単なる“ロボット開発”ではなく、幅広い活用分野を想定している。担当者が「現状のモビリティでは入れないような足場の悪い場所へも、この脚構造を活かして対応できる設計を目指しています」と語るように、自然地や山岳地域での移動を想定している。
主な用途としては以下などが挙げられ、官民双方での導入が期待される。
- 山岳観光やアウトドアアクティビティ
- 災害救助や地形調査
- 高齢者や障害者の移動支援
- ミリタリー・セキュリティ用途
CORLEOは、山岳地域での安全な冒険体験の提供を主眼に置いている。「SAFE ADVENTURE」という開発コンセプトのもと、天候・路面状況・野生動物の出現といった外部環境を検知し、スマートフォンなどのデバイスを通じて安全なルートを提示するナビゲーションシステムの開発も進行中である。
将来的には、災害救助・山岳調査・自然観察・エコツーリズムといった用途への活用が見込まれており、「誰もが安全・安心に自然を楽しめる社会の実現」に貢献する乗り物となる。
世界唯一の「搭乗型四脚モビリティ」が持つロボット産業におけるCORLEOの意義

現在、世界には様々な4脚歩行ロボットが存在するが、それらのほとんどは無人運用やデータ取得用機器を搭載した作業用途であり、「人が搭乗し、自ら操縦する」というパーソナルモビリティに着目したCORLEOは極めてユニークな存在である。川崎重工の担当者も、「このような搭乗型4脚モビリティを開発しているのは、世界でも当社だけだと認識しています」と明言している。
CORLEOは、川崎重工のロボット事業とモーターサイクル事業の技術が融合したからこそ実現できた製品であり、同社のグループビジョン2030における注力分野「安全・安心リモート社会」「近未来モビリティ」「エネルギー・環境ソリューション」のすべてに適合する、象徴的な存在といえる。
2030年のリヤド万博での動態展示を経て、2035年の量産化が実現すれば、CORLEOは「人が乗って操縦する地形対応型ロボットモビリティ」という新市場を創出する可能性を秘めている。その進化の行方は、ロボット産業全体の進路にも影響を与えることになりそうだ。