2025年6月26日、東京大学生産技術研究所などからなる研究グループは、南極リュツォ・ホルム湾およびトッテン氷河沖で、自律型海中ロボット(以下、AUV)による無索(ケーブルなし)での海氷下航行に成功したことを発表した。
同研究グループは、南極の海氷や棚氷域を探査する新しいAUV「MONACA」(モナカ)を開発してきた。第66次南極地域観測において南極海(南大洋)のリュツォ・ホルム湾とトッテン氷河沖において、無索でのAUV運用に成功した。

南極の氷床や海洋環境では、船舶の入れない棚氷(※1)や海氷の裏側、その下に広がる海はほとんど観測できていなかった。ケーブルが不要かつ全自動で運用できるAUVが注目されているが、母船の動きが制限されるため連携が難しく、浮上できる場所が限られるなどの課題から、氷海域での展開事例は限られていた。
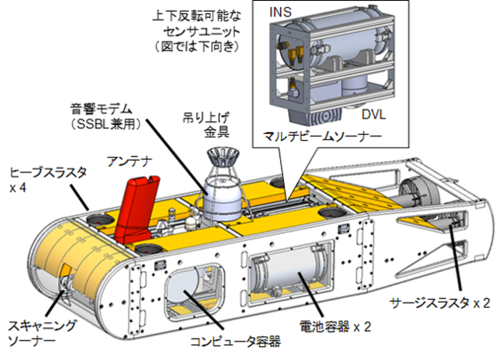
そこで、MONACAが氷海域の深部へ潜入して形状を計測し投入地点まで安全に戻れるよう、マルチビームソーナー(※2)とDVL(ドップラー式対地速度計※3)、INS(慣性航法装置※4)を備えたセンサーユニット、音響測位装置、およびこれらの機器による氷および母船に対する相対ナビゲーションアルゴリズムを実装した。このセンサーユニットは氷を計測する際は上向きで、上下反転することで海底の計測にも対応する。また、複雑な氷裏面の形状に沿って航行できるよう、スキャニングソナーによる障害物回避手法やホバリングのできる高い運動能力を備えている。
※1 陸上の氷河や氷床が海上に張り出した部分。
※2 複数の超音波ビームにより物体の形状を計測するセンサー。
※3 海底に超音波ビームを照射し、その反射波の周波数から海底に対する相対速度を求めるセンサー。
※4 高性能な加速度・角速度センサーによって自身にかかる力を計測し、自己位置や姿勢を推定する装置。
第64次南極地域観測(夏隊)では、南極海でのAUV運用を昭和基地沖の定着氷およびラングホブデ氷河沖で実施。20回の潜航で、合計17時間、15kmの自律航行を行い、延べ約0.5km²の海底地形形状と約0.46km²の海氷裏面形状を得たが、無索運用ができず母船の南極観測船「しらせ」周辺での運用になった。
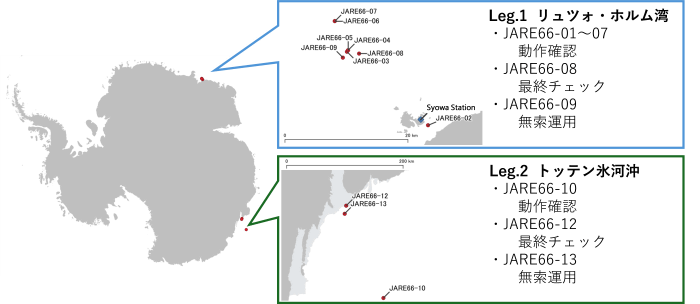
第66次南極地域観測(夏隊)では、64次の結果をもとにMONACAの性能向上を図るとともに、運用方法を再検討した。リュツォ・ホルム湾では6日間で8回の航行を実施し、合計で約11km航行する中で映像・海流・水質などのデータを得た。2025年2月8日には無索での100mの往復航行に成功した。トッテン氷河沖では4日の運用日程で2回、合計で約1.5kmの航行を実施。このうち1回は無索で200mを往復航行した。無索運用の達成により、従来は母船近傍に限られていた運用範囲が数百メートル規模に拡大し、これまで観測が困難だった棚氷下部の探査が現実的な目標となりつつある。

今回の実験により、MONACAによる南極海の完全結氷域探査の技術的めどが立った。具体的には、「1. 母船との連携が難しい、2. 音響が乱反射することで位置推定が難しい、3. 浮上できる場所が氷の無い環境に限られる等の課題」に対して、「1.2. 氷および母船に対する相対ナビゲーションアルゴリズム、スキャニングソーナーによる障害物回避手法によって、母船との連携が困難+音響が乱反射する環境下でも自律的に探査できること、3. ホバリングという高い運動能力によって限られた場所に浮上できること」を確認し、さらにCTD(※5)などのセンサーで水質データも取得できた。
今後、自律航行アルゴリズムの性能向上を図り、2025年度の第67次南極地域観測では、さらなる長距離運用を目指す。同研究グループは、南極の海氷や棚氷の計測を通して、地球システムにおける南極の役割の解明や地球環境変動予測の高精度化に貢献するとしている。
※5 Conductivity(電気伝導度)、Temperature(温度)、Depth(深度)という海水の基本パラメータを計測するセンサー。これらの情報から塩分濃度や水中音速を推定できる。
発表者・研究者等
東京大学
生産技術研究所
巻 俊宏 准教授
山縣 広和 特任研究員(研究当時)
現:日本工業大学 先進工学部 ロボティクス学科 准教授
大学院新領域創成科学研究科
関森 祐樹 博士課程
竹本 健人 修士課程
国立極地研究所
先端研究推進系 生物圏研究グループ
真壁 竜介 准教授
先端研究推進系 地圏研究グループ
野木 義史 教授
東京海洋大学 海洋環境科学部門
溝端 浩平 准教授
論文情報
学会名:日本地球惑星科学連合2025年大会(JpGU 2025)
題名:氷下探査AUV "MONACA"の開発 - JARE 64, 66における南極海での自律航行 -
著者名:山縣広和、関森祐樹、山本和、真壁竜介、藤井昌和、吉田弘、田村岳史、野木義史、巻俊宏