2024年12月6日、KDDI、アイサンテクノロジー、KDDIスマートドローン、KDDI総合研究所、ティアフォーは、物流2024年問題など労働力不足の解決や、災害時の山間部への物資配送の効率化に向けた、自動配送ロボット・自動運転車・ドローンの協調配送実証に成功した。
5社は今後、労働力不足が顕在化する2030年をめどに、建物内からの配送や都心ビルへの配送は自動配送ロボット、都市部からの大規模な配送は自動運転車、陸上からの輸送が困難な地域ではドローンで配送を行うといった地域に適したモビリティを組み合わせた全自動の荷物配送サービスの社会実装を目指す。
今後KDDIは、同実証を通じて培った技術をWAKONX(※1) Mobilityに組み込み、ロボットや自動運転車、ドローンの協調制御を支援する。業務の自動化や省人化を促進し、特に物流の効率化や災害時の迅速な対応、高齢者の移動支援といった社会課題の解決に取り組む。
※1 WAKONX(ワコンクロス):3つの機能群を有するAI時代のビジネスプラットフォーム。WAKONXを通じて、最適化したネットワークの設計・構築から、大規模計算基盤による企業間データの蓄積・融合・分析を行う。また、AIが組み込まれたサービスやソリューションを各業界に最適化して提供する。


国内では物流2024年問題など労働力不足が社会課題となっており、各モビリティの強みを組み合わせた全自動配送の実現が期待されている。5社は、自動運転に関する実証実験を2024年度を含めて50件以上実施しており、ドローンや自動配送ロボットに関する実証実験も多数行っている。
全自動配送の実現に向けて「協調制御プラットフォーム」を開発し、2023年9月には自動運転車からドローンが離着する実証に成功。全自動配送実現による人手不足解消に向け、協調制御プラットフォームの対象を自動配送ロボットにも拡大するため、本実証を実施する。
実証の概要
5社は本実証において、自動配送ロボット、自動運転車、ドローンを協調制御し、各モビリティの合流地点を最適計算する統合配送経路計算技術を開発。建物内で荷物を受け取った自動配送ロボットと、ドローンを積んだ自動運転車が連携してお互いに最適な合流地点へ移動することに成功した。また、自動配送ロボットから自動運転車へ荷物を受け渡した後、最適なドローンの離陸地点まで自動運転車が移動し、ドローンが離陸、目的地へ着陸、荷物の配送を完了したことを確認した。
各モビリティが協調することで物流の労働力不足を解決できるほか、災害時の山間部への物資配送を効率化できることを確認した。
【実証のポイント】
1. 協調制御の対象を拡大
自動運転車とドローンにおける協調制御プラットフォーム(2023年9月時点)に自動配送ロボットを加えるため、自動配送ロボットの位置情報を示すローカル座標から、自動運転車やドローンの位置情報を示す緯度経度座標へ変換する機能を追加。協調制御プラットフォーム上で3つのモビリティの位置情報のデータ連携が可能になった。

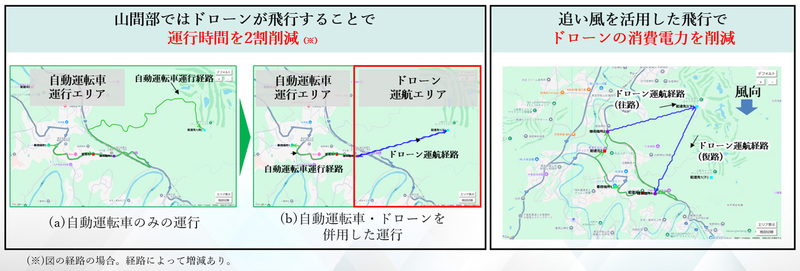
2. 統合配送経路計算技術による配送最適化
配達元、配送先のみを選択するだけで、各モビリティの最適な合流地点を自動計算する。配送地域の特性や風向を考慮した計算により、山間部における運行時間削減や、追い風を活用した飛行によるドローンの消費電力削減が可能。
【実証の流れ】
[1] 建物内の施設で自動配送ロボットが荷物を受け取り
[2] 統合配送経路計算技術で自動配送ロボットと自動運転車の連携地点を算出(屋外)
[3] 連携地点で自動配送ロボットから自動運転車へ荷物を受け渡し
[4] 自動運転車が山道手前で停車
[5] 山道手前でドローンが離陸
[6] 山道奥のドローンポートへ着陸、荷物を受け渡し、ドローンが離陸
[7] 自動運転車横にドローンが着陸
[8] 配送を完了した自動配送ロボット、自動運転車、ドローンは、次の配送予約に備えて元の場所に戻る
【実証に利用したスマートモビリティ】



【場所】
千葉県君津市の中山間地域
【各社の役割】
| KDDI | ・本研究開発の全体統括および統合実証主管 ・自動配送ロボット・自動運転車・ドローンの協調制御プラットフォームの開発 ・PPP-RTK方式の高精度位置測位サービスの提供 |
| アイサンテクノロジー | ・高精度3次元地図の製作 ・異なる測位方式の連携(座標変換システム)構築 ・自動運転車の安定走行のための地図更新システムの開発 |
| KDDIスマートドローン | ・ドローン飛行のための行政や関係者との調整・協議・許認可手続き ・ドローン飛行システムの技術開発・提供 |
| KDDI総合研究所 | ・衛星回線とセルラー回線のシームレスな切り替え手段の開発 |
| ティアフォー | ・自動運転システムの技術開発・提供 |
なお、この実証は、情報通信研究機構(NICT)から受託した「スマートモビリティプラットフォームの実現に向けたドローン・自動運転車の協調制御プラットフォームの研究開発」の一環として行ったものとなる。