2024年9月6日、Liberaware(以下、リベラウェア)は、東京都主催のピッチイベント「第35回 UPGRADE with TOKYO」で採択された「下水道施設における新たな工事出来形確認手法の構築」の第1回目の実証実験を実施したことを発表した。
同社の狭小空間専用ドローン「IBIS2(アイビスツー)」と移動式LiDARを活用して生成した3次元データを、出来形確認に活用することを目指す。今後は実用化に向け、3次元データ生成における品質の安定化、生成までの時間や労力の効率化を図る。
東京都下水道局は、老朽化した下水道施設のリニューアルや頻発する豪雨への対応を進めるため、さまざまな工事を実施している。下水道工事の完成時には、検査担当職員が現場で、形状や寸法といった出来形を施工管理基準に照らし合わせて確認しているが、高所や狭隘(きょうあい)部、硫化水素など有害なガスが発生する所があるなど、特に安全対策に労力と時間を要している。
同局はピッチイベントにおいて、3D測量や画像認識AI等を活用することで人による確認作業の手助けとなる新たな工事出来形の確認手法を募集し、IBISを活用したリベラウェアのソリューションが採択された。
第1回 実証実験について
工事出来形確認業務をより正確で効率的に行うことができる新たな手法の構築を目指すにあたり、現時点での技術で対応可能な範囲と課題の洗い出しを行った。
【実施概要】
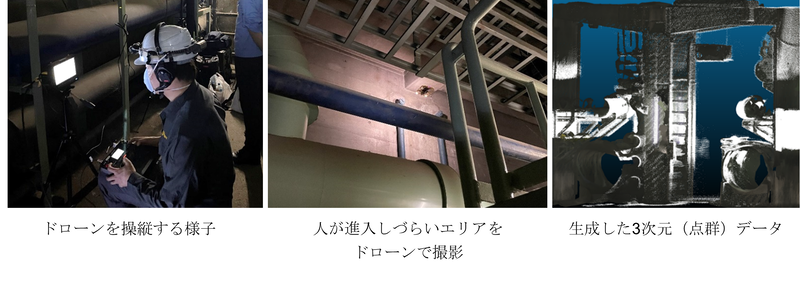
・ 人が通行できるエリアでは移動式LiDARによる点群生成を実施する。
・ 人が立ち入りづらいエリア(配管で死角になっている箇所、高所、狭所)はIBIS2で撮影を行い、画像処理(SfM)による点群生成を行う。
・ LiDARで生成した点群データとSfMで生成した点群データをマージさせ、試験エリアの点群データを完成させる。
・ 完成した点群データの精度と要した時間等を検証する。
人が進入することが難しく、3Dレーザースキャナーを使用しても死角になるエリアでも、IBIS2を活用することで点群データを生成できることを確認した。その精度は、1回目の実験では現状の出来形確認で行っている測定方法と比較しても同等レベルであった。
今後、ドローンの撮影時間の短縮、画像処理(SfM)にかかる時間と人手の効率化、高い品質の点群データを安定的に生成するためのメソッド確立に取り組み、実現場での活用を目指す。2025年3月に新手法(メソッド)の提案書を提出するため、年内にあと2回の実証実験を予定している。