2023年7月6日、日本工業大学は、同大学電気電子通信工学科の平栗健史教授が、ハチや人手を必要としないトマト受粉システムを考案したことを発表した。
同研究は農林水産省 生物系特定産業技術研究支援センターの「イノベーション創出強化研究推進事業」に採択され実施したもので、AIが受粉可能な花の識別を行い、ロボット飛行制御技術と連携した10cm角のドローンがハチのような役割を担う。
同システムの実験を実際の圃場で行い、その実用可能性と、従来方法に比べて着果率が改善することを実証した。

果実栽培における花の受粉作業はハチによる媒介、あるいは人の手(人工授粉)による方法が主流となっている。しかし近年、温暖化や農薬などの影響により昆虫(ミツバチ)の管理が難しくなっており、特に活動が低下する夏場には人工授粉に頼らざるを得ない状況だという。一方、農業従事者の減少や高齢化によって技術継承が難しくなるとともに、作業者確保に大きなコストが生じることも問題となっている。
こうした課題に対し、2020年4月~2023年3月の3年間の研究期間を経て、ドローンによる受粉システムを考案した。2023年1月にトマト栽培の温室ハウスにおいて実験を行い、実用化につながる研究成果を得ただけでなく、従来方法より着果率が約10%改善することを実証した。
【システム構築に活用する技術】
・ 複数のドローンが効率的にハウス内を巡回するための自律飛行制御
・ 受粉可能な花弁形状を画像から自動判定するAI判定アルゴリズム
・ ドローンに実装する小型で、花に接触すると自動で動作する受粉用振動機
・ 障害物が多いハウス内でドローンを安定飛行させる通信技術
【実験のシステム構成】
・ モーションキャプチャ(赤外線)カメラ:ドローンの位置情報(座標)を把握する目的で、ハウス上部に複数台配置。
・ ドローン:花を探して花弁の状態を撮影する機能、専用振動機による受粉機能を併せて実装。
・ ドローン飛行制御用PC
・ 花弁状態判定用PC
※Wi-Fiを介して相互に通信して情報共有を行い、指示を伝える。
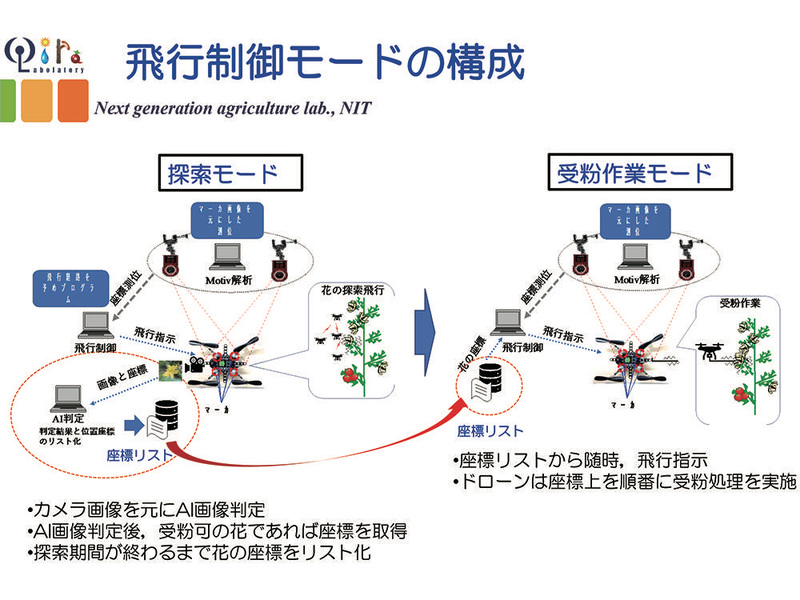
【実験のプロセス】
1. モーションキャプチャカメラが、飛行中の複数のドローンをリアルタイムで捉え、その座標を随時ドローン飛行制御用PCに送信。
2. ドローン飛行制御用PCが設定した巡回プログラムに従って、ドローンに飛行経路を指示。
3. ドローンが花を探してカメラで撮影し、画像データを花弁状態判定用PCに送信。
4. 花弁状態判定用PC搭載のAIが画像から花弁状態を分析して受粉可能な花を判別。その座標をリスト化し、ドローン飛行制御用PCに送信。
5. ドローン飛行制御用PCからドローンに指示を出し、座標上を順番に受粉作業を実施。なおトマトは自家受粉植物のため、花を振動させるだけで受粉が完了する。
実験の結果、ハチや人手による従来の方法と比較して着果率が約10%改善し、同システムが栽培現場において実用性があることを実証した。現在この技術を応用し、ナシ栽培における実験に取り組んでいる。