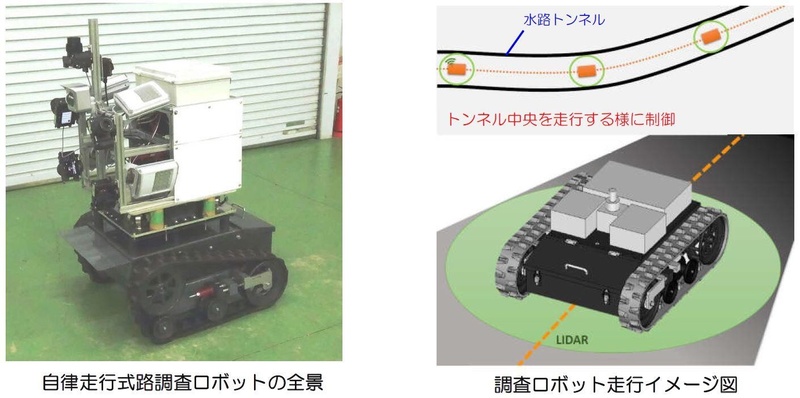
2023年3月23日、西松建設は佐賀大学伊藤研究室と共同で、水路トンネル内における調査点検業務の省力化・効率化を図るために、自律走行式水路調査ロボット「turtle」を開発したことを発表した。
このロボットは走行部にSLAM技術を活用した制御システムを実装し、トンネル線形に沿ってトンネル中央を維持しながら自律走行する。同システムにより、水路トンネルの調査点検から記録までの一連の維持管理業務を大幅に軽減することが期待される。
水力発電所等の水路トンネルでは、国から3年に一度の調査点検が義務付けられており、トンネル内部からの近接目視などによる覆工のひび割れなどの変状や、漏水の発生状況の把握が求められる。しかし、延長が数kmにもおよぶ水路トンネルに人が進入しての作業は、点検者の安全や身体的負荷といったリスクだけでなくコストや手間を要する。また、取得した情報を処理する作業にも時間と手間が掛かるため、省力化・効率化が求められている。
これまでにもドローン型、浮体型、飛行船型など、人の代わりに調査点検するロボットの開発が進められているが、積載できる重量の制約から小容量のバッテリーしか搭載できないことで飛行時間が短かいことや、坑内の水流や風況条件によって機体の方向制御が困難であるなどの課題があった。
自律走行式水路調査ロボット 概要
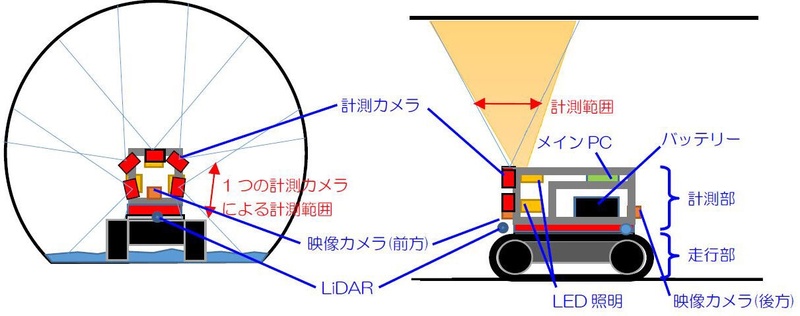
自律走行式水路調査ロボットは、自律走行可能な走行部と、各種カメラと照明およびバッテリーなどの計測部によって構成されている。走行部はLiDARにより壁面との位置関係を把握して、トンネル線形に沿ってトンネル中央部を維持しながら自律走行する。その上部に搭載した計測部の照明や計測カメラなどから、トンネル壁面の高精細な画像をくまなく取得する。
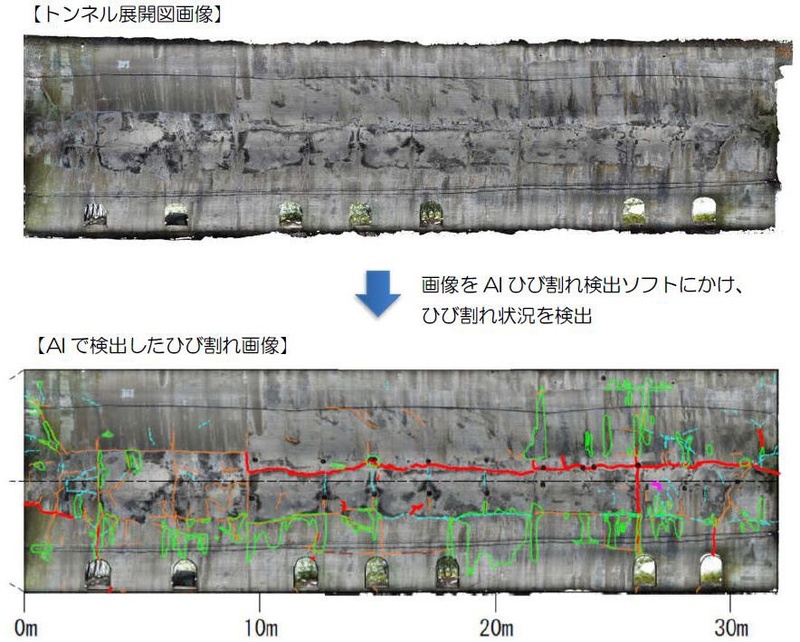
計測部には高解像度の計測カメラ5台をトンネル断面方向に対して半円形状に搭載し、トンネル壁面の高精細な画像を取得する。さらに同部の前後に広角レンズのカメラを1台ずつ搭載することで、同ロボットによる調査状況を撮影し、坑内の漏水や異常箇所を映像として記録する。また、取得した画像からソフトウェアによる画像解析を行い3次元モデルを構築し、その後オルソ画像抽出・展開図を作成、AIによるひび割れ自動検出(幅0.1mm以上)が行える。
今後は開発実績を踏まえ、さらなる柔軟性の高いシステム構築を目指して改良を図るとともに、遠隔調査点検技術の構築と老朽化するインフラ点検業務におけるDXの実現を目指すとしている。

取得画像の処理方法
主な特徴
1. 直径6m程度、延長2km程度のトンネル内を調査点検可能
2. 微細なひび割れ(幅1mm以上)の検出が可能
3. トンネル壁面の画像に加え、坑内状況(漏水など)を映像として記録するため、補修・改修計画の事前検討において基礎情報が収集可能
4. SLAM技術の活用により、自己位置推定と環境地図作成が可能
5. AIによるひび割れ自動検出によって、検出結果の客観性の担保および点検者の変状抽出作業の負担を軽減
期待される効果
1. 目視点検で行っていたスケッチなどの記録作業が不要なため、作業要員の省人化、報告書類作成を効率化
2. 調査点検結果を3次元モデルや展開図により記録保存することで、前回調査結果と比較検討が可能となり、変状の経時的変化を把握でき、維持管理計画の立案をサポート
3. 小断面トンネルなどの劣悪な作業環境において、点検者のリスクを低減