2021年11月12日、リアルグローブは、10月29日に国土交通省近畿地方整備局 木津川上流河川事務所が主体となり実施した、三重県伊賀市での実証実験「ドローンによる巡視体制の強化~自律飛行ドローン・赤外線カメラによる識別能力を強化させDXを推進~」に協力したことを発表した。
同社はドローン等からの取得情報を地図上に集約し共有するプラットフォームである「Hec-Eye」を使用し、実施協力を行った。
木津川上流河川事務所では河川管理の一環として、洪水時などに車両で巡視し通行者や農耕作業中の一般市民に向けた呼びかけを行っている。広範な巡視を含む河川管理の負担軽減、効率化、省人化に向けてドローンによる河川巡視を検討しており、今回ドローンを活用した洪水時巡視を試行し、運用上の課題や効果を確認することを目的に実証実験を行った。
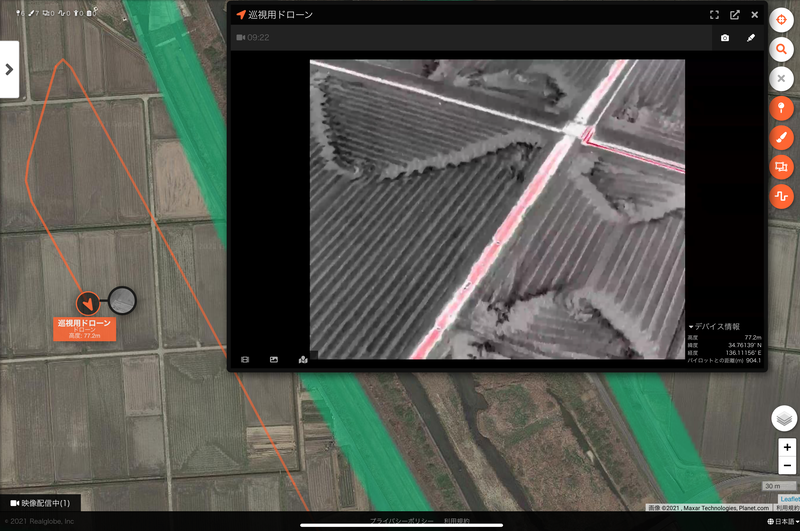
具体的には、自律飛行ドローンによる巡視の試行として、2地点の離発着場所を起終点としてそれぞれ30分程度の巡視を行った。また、赤外線カメラを搭載したドローンで撮影したリアルタイム映像を、集中管理センターの監視モニターにライブ配信した。
巡視の補助システムとして、ドローンやスマートフォンによるリアルタイム映像や位置情報を遠隔拠点に共有し、現地の状況を把握するためにHec-Eyeを使用した。
今回の実証実験では、現場状況を迅速に共有するとともに、遠隔拠点から通行者を発見することができた。リアルグローブは今後、現場での実運用に向けて円滑な映像中継を行う実施体制の整備など検証を重ねるとしている。
<実証実験 参加者>
・ 国土交通省 近畿地方整備局
・ 国土交通省 木津川上流河川事務所
・ パスコ(実験計画、実験統括)
・ ヘキサメディア(ドローン操縦)
・ リアルグローブ(映像配信)