2020年12月23日、農研機構、立命館大学、デンソーは、果樹生産の大幅な省力化を目指し、人とほぼ同じ速度でリンゴやナシなどの果実を収穫するロボットのプロトタイプを開発したことを発表した。

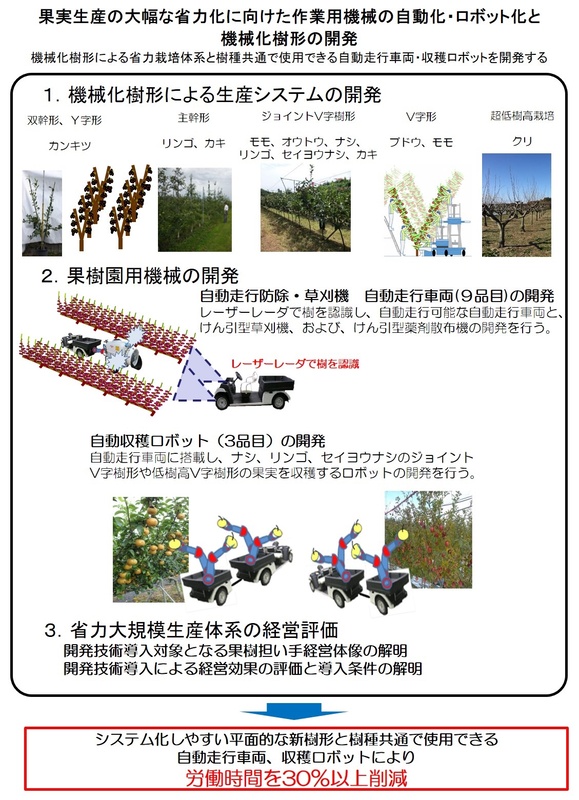
農研機構、立命館大学、デンソーでは、果樹生産の担い手の減少と高齢化に対応するため、作業の大幅な省力化に向けた作業用機械の自動化・ロボット化と機械化に適した樹形の開発を推進している。具体的には、カンキツ、リンゴなど果樹9品目において、作業の自動化・機械化が容易なV字樹形(※1)などの列状密植樹形(※2)を開発するとともに、V字樹形に合わせて様々な作業に利用できる自動走行車両や収穫ロボットの開発を進めてきた。
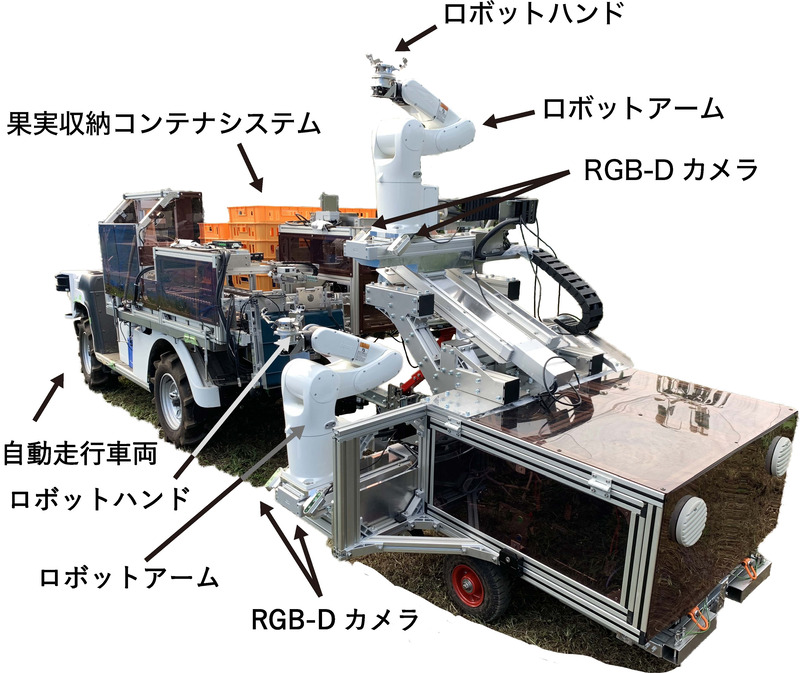
今回3法人は共同で、V字樹形のリンゴ、ニホンナシ、セイヨウナシを対象とした果実収穫ロボットのプロトタイプを開発した。
このプロトタイプは、自動走行車両にけん引されながら、2本のアームにより果実の収穫を行う。収穫した果実は自動走行車両の荷台に設置した果実収納コンテナシステムに送られ、果実収納コンテナシステムではコンテナが果実で一杯になると、空のコンテナと自動で交換しながら自動収穫を継続する。人による収穫(11秒/個)とほぼ同じ速度で収穫が可能である。
収穫ロボット開発では、立命館大学が果実認識、収穫時期判定などのソフト開発を、デンソーが収穫ロボットのハード開発を担当した。

□は認識に成功した果実。青と赤の◎は、ていあ部(果頂部、果実の尻の窪んだ部分)の果皮色から収穫適期を判断するためのていあ部の認識。Cam1~Cam4の画像は、収穫ロボットに取り付けられた4台のカメラが同時に撮影したそれぞれの画像。1つの画像中の果実の番号は、1つのカメラが認識した果実の通し番号。
▼取り組みの詳細(PDF)
https://www.denso.com/jp/ja/-/media/secure-news/jp/ja/news/news-releases/2020/20201223.pdf
関連情報
予算:農研機構生研支援センター「革新的技術開発・緊急展開事業(うち人工知能未来農業創造プロジェクト)」
http://www.naro.affrc.go.jp/brain/h27kakushin/files/aipro_subject2_03.pdf
※1 V字樹形 :図1の上部に示したような、樹の形が「V」の文字に見える樹形の総称。
※2 列状密植樹形 :図1の上部に示したような植栽が列状で樹間隔が密植となる樹形の総称。V字樹形も含まれる。