頭脳に身体を与える――ディズニーが磨く動作生成技術
頭脳がいかに賢くとも、それを宿す身体が思いどおりに動かなければ意味がない。その身体側を磨いてきたのが、ディズニー・リサーチである。チューリッヒ・ラボのディレクター、モリッツ・ベーチャー(Moritz Bächer)氏は、同社の「ロボットキャラクター・プラットフォーム」を紹介した。『スター・ウォーズ』のBDXドロイドや、パリのディズニーランドを歩き回る雪だるまのオラフ。キャラクターをスクリーンから現実へ連れ出すのが、その使命だ。
ベーチャー氏の野心は、新キャラクターを数カ月で設計・製作すること。BDXドロイドはコンセプトから3体の完成まで1年足らず、オラフは約4カ月だったという。スピードの源泉は、ハードウェアのモジュール化にある。アクチュエーターやセンサーをファミリーとして揃え、カスタム基板やランタイムシステムをキャラクター間で再利用する。「同じ部品を使えば、前のキャラクターのランタイムを再利用できる」と氏は説明した。

もう一つの鍵が強化学習(reinforcement learning)だ。ロボットが歩行するプログラムを書くのではなく、シミュレーションの中で歩行を学習するアプローチだ。デスクトップGPU上で同時に4,096個のシミュレーションを走らせ、現実世界の10年分に相当する訓練を、1台のマシンで数時間から数日でこなし、学習結果をそのまま実機へ載せている。
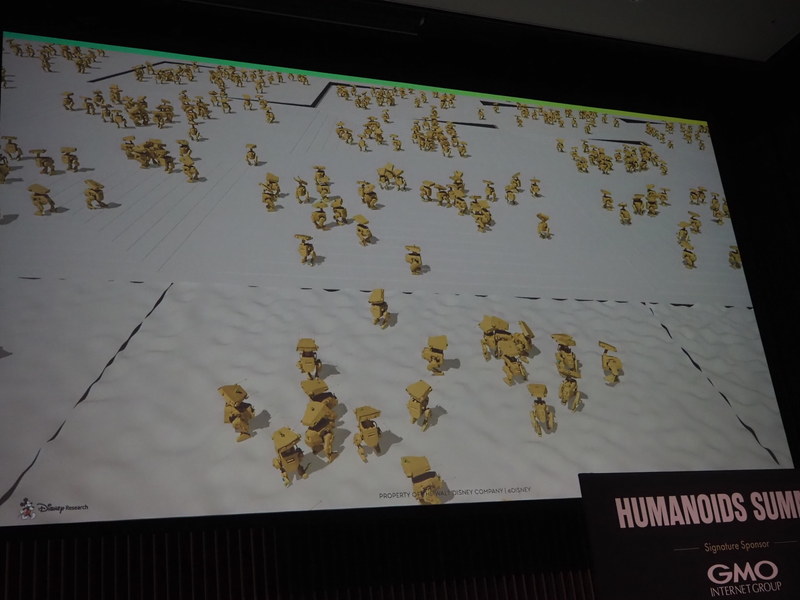
オラフでは、さらなる工夫が要った。試作機が歩く音を聞いて、氏は「雪だるまの歩く音が聞こえてはいけない」と気づく。そこで衝撃音を減らす報酬を導入した。これは副次的に、アクチュエーターの摩耗を抑えロボットの寿命を延ばす効果も持つ。「私たちのミッションは、ロボットを可能な限り信じられる存在にすること。見えるべきは、聞こえるべきは、キャラクターだ」とベーチャー氏は語った。
こうした学習を支える自社開発のシミュレーター「Camino」は、通常のGPUシミュレーターが苦手とする閉ループ機構まで扱え、NVIDIA・ETHチューリッヒとの共同開発のうえオープンソースで公開している。
技術を量産に乗せる――ユニツリー「データは石油、モデルはエンジン」
頭脳と身体の技術を、いかに事業として量産に乗せるか。その問いに答えたのが、ユニツリーである。APEC担当ディレクターのシャオリ・チェン(Xiaoli Chen/英語名Irving)氏は、2016年創業・本社600名、杭州を拠点とする同社が、いま中国本土でロボティクス分野初の上場をめざしてIPOプロセスを進めていると明かした。
チェン氏は、現在の華やかさの前に「冬の時代」があったことを忘れなかった。2020年以前、展示会には少人数で参加したため、昼食やトイレに立つ暇もなく、その場を離れればロボットが倒されても起こす人がいなかった。初期の出荷品は「48時間以内に必ず何らかの問題が起きた」とも明かした。地道な耐久性の積み重ねの上に、現在がある。
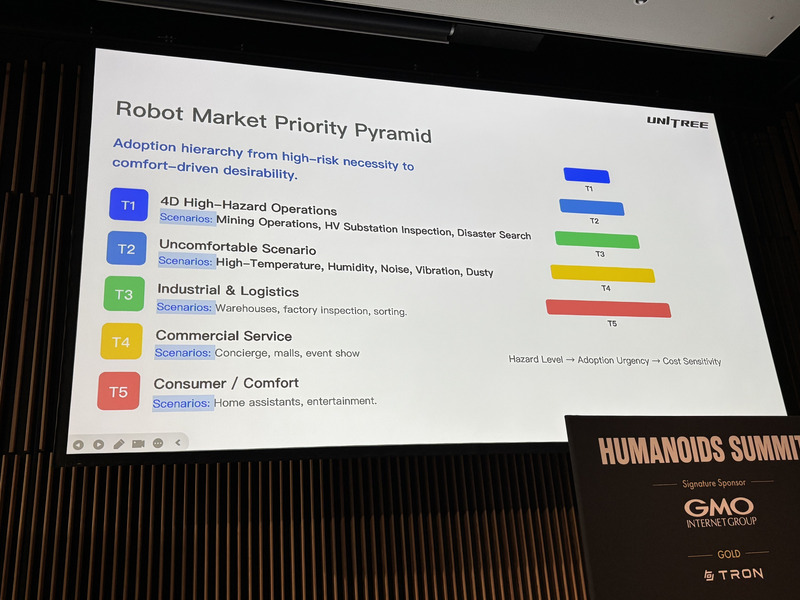
ロボティクス市場の捉え方として、氏はティア1からティア5までのピラミッド構造を示した。ここで使ったのが、汚い(Dirty)・困難(Difficult)・危険(Dangerous)の「3D」に「繰り返し(Duplicated)」を加えた「4D」という概念だ。鉱山や原子力、国境沿いといったティア1・2では「目標はROIではない。人間が危険にさらされる頻度を減らし、事故を減らすこと」とチェン氏は強調した。
一方で量産には3つのボトルネックがあるという。身体性AIの評価、製造(耐久性)、そしてエッジコンピューティングである。最後の一つについて氏は、街や村ごとに小さな計算センターを置き、その地域のロボットをまかなう構想を語った。
現状の課題も率直だった。注目と生産性のバランス、POCどまり、長時間にわたるマニピュレーションの3点だ。こうした課題に向き合う軸として、チェン氏はオープンソース戦略を挙げた。多くのパートナーや研究者に、テレオペレーションデータやVLAなど、さまざまな情報をオープンソースで提供している。すでに世界中の研究者がユニツリー製品を基に書いた論文は440本を超え、うちヒューマノイド関連は約300本に達しているという。
その思想を凝縮したのが、「データは石油、モデルはエンジン」という比喩だ。「効率的なエンジンがあれば、より多くの生産性が生まれる。石油(データ)が多ければ多いほど、より遠くまで走れる」。チェン氏はフィールドAIのアガ氏やPhysical Intelligence、Skild AI、NVIDIA Isaac Labとの連携にも触れた。そしてPC、スマートフォン、EVに続く「新しい世紀」としてロボティクスを位置づけ、「人類に豊かさをもたらす」と講演を結んだ。