
GMO AI&ロボティクス商事(GMO AIR)は、ヒューマノイドロボットを活用した新たな実証実験プロジェクト「GMOインターネットグループ陸上部-GMOロボッツ」(GMOロボッツ)を発表した。トップアスリートの走行データを基にロボットの動作学習を高度化し、ヒューマノイドロボットによる陸上競技と社会実装を両輪で推進する試みである。
●【クレジット】GMOインターネットグループ陸上部-GMOロボッツ 発足記者会見
この数年でヒューマノイドロボットの技術は急速に進化を遂げている。これは、単なる動作性能だけでなく、AIやセンサーと組み合わせることによって自律的に認識判断し、試行錯誤を繰り返して最適な動きを獲得するまでに至っている。このような進化から、同社は2026年を「ヒューマノイド元年」と位置づけ、競技大会への参戦を通じてロボット技術の進化を加速させるとともに、労働力不足という社会課題の解決に向けた実用化に取り組むことを発表した。
トップアスリートの“質の高いデータ”がロボットを進化させる
GMOインターネットグループは、2026年1月に開催された「第70回全日本実業団対抗駅伝競走大会(ニューイヤー駅伝2026)」において、大会新記録による初優勝を達成している。本プロジェクトの最大の特徴は、ニューイヤー駅伝で優勝した実業団チームのトップアスリートの走行フォームを、モーションキャプチャによって詳細にデータ化し、それをヒューマノイドの学習に活用する点にある。
従来、ロボットの動作学習では大量のデータ収集が重視されてきた。ロボット開発を手掛ける企業では、施設に多くの人員を集め、繰り返し動作を行うことでロボット学習用データを大量に蓄積している。一方、今回のアプローチは「量より質」に重きを置く。内田社長は、「プロ選手の動きは再現性が高く一貫しているため、ロボットの学習効率と精度を飛躍的に高めることが可能になる」と説明する。
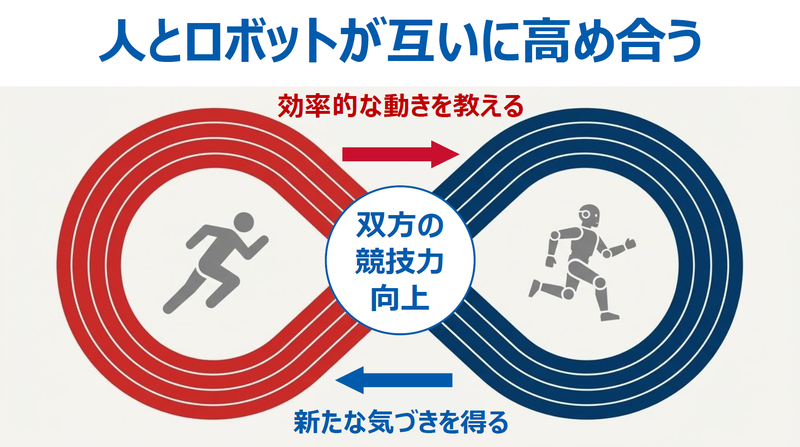
さらに興味深いのは、この取り組みが一方向ではない点だ。ロボットへの実装過程で可視化されたデータは、逆に選手自身のフォーム改善にも寄与する。関節の動きや重心バランスといった微細な差異が明確になることで、選手たちは競技力向上の新たな気づきが得られているという。この「人がロボットを育て、ロボットが人を進化させる」という双方向の関係は、スポーツとテクノロジーの融合における新たな価値創出の可能性を示している。
競技から社会実装へ――ヒューマノイドの実用化ロードマップ
GMOロボッツは、2026年8月に中国・北京で開催予定の世界ヒューマノイドロボット競技大会への出場を発表。2025年に第一回を開催した同競技大会では、ロボット競技である陸上競技7種目や床運動、サッカーのほか、パフォーマンス競技であるダンス競技、さらには応用シーン別競技として工場内資材運搬・整理や病院での医療品の仕分け、ホテルの接客対応といった産業シーンを想定した競技も行われる。GMOロボッツは2026年の競技大会において、最大1500mの陸上競技への出場を目指す。

現在は、ひとみん1号と命名された中国Unitree社のヒューマノイドロボット「Unitree G1」を使って走行動作の実証を進めている。現時点でのロボットの走行速度は約3m/秒に到達しており、優勝ラインとされる約5m/秒を目標に開発が進められている。
もっとも同社は単純なスピード競争ではなく、将来の産業用途に向けた社会実装を見据え、「人間と同等レベルの自然な動作」を重視している点が特徴的だ。
この競技開発で培われる技術は、以下の3つの基盤として社会実装に直結する。
- 高度な歩行・走行制御技術
- 人の動きを取り入れた自然な動作学習
- センサーとAIによる自律走行
すでにGMO AIRでは、ヒューマノイド型を含むロボットのレンタル・派遣事業を展開している。内田代表は「イベント用途への派遣が約7割を占めています。一方、工場などでの中長期利用も3割に達しており、今後1〜2年で、工場などの実務現場への導入がさらに進む見通しです」と話した。
工場や施設管理、さらには物流や点検といった分野において、ヒューマノイドロボットは「人間と同じ環境で持続的に働ける」という特性を活かし、既存インフラをそのまま活用できる点で大きな優位性を持つ。これは労働人口減少という日本社会の構造的課題に対する有効な解決策となり得る。
ヒューマノイドロボットの走りを実演、着実なロボットの進化を体感

実際にGMOロボッツが動作学習を行っているUnitree G1の走行実演が行われた。
はじめに屋内で動作学習中のモードで走行を行った。トップアスリートのモーションキャプチャーデータを動作学習に使用しているが、まだバランスを取るのが難しく、直進して走ることが課題とされる状況であった。走行速度は人のジョギング相当で、動作学習を終えた後に微調整を施していく予定だという。
屋外では開発中のモードから走行モードに切り替えて実演が行われた。実際にトップアスリートたちと走り始めると、約50mの距離をスムーズにまっすぐ走る様子が見られた。
屋内の走行では、まっすぐ走ることができず壁面に接触、さらには人のペースに合わせて走行していて転倒する場面が見られた。転倒した姿が悲しんで見えたり、人に引きずられて移動する姿が子供を連れているように見えたりと、無機質であるはずのロボットから感情が伝わってくるような気がした。内田代表も「転倒した時にはロボットが肩を落としているように見えます。そのように感情を汲めることから人との親和性も高いと評価しています」と話した。
GMOロボッツは同プロジェクトを通じて、人の動きに近い自然な動作をロボットで実現しようとしている。その先には、物流(搬送や仕分け)や点検などの作業だけでなく、人命救助や災害対応といった人と接する任務の遂行も考えられる。ヒューマノイドロボットの価値は、人間の作業環境に適応し、人間と協働できる点にある。つまり、「人を超える」のではなく「人と共に働く」ことこそが本質的な目標なのである。