QuickはZEALS(以下、ジールス)と共同で、2026年3月23日から25日までの3日間、筑波大学附属病院においてヒューマノイドロボット「Unitree G1(ユニツリー ジーワン)」を用いた実証実験を実施した。
ジールスが開発するロボティクス向けOS「Omakase OS」を搭載したヒューマノイドロボットを用いて、病院内における自律歩行、障害物回避、会話による道案内・運搬業務、異常検知などを検証した。
医療現場では慢性的な人手不足が続く中、看護師やスタッフ、職員が本来注力すべき専門業務以外の多くの周辺業務を担っており、身体的・時間的負担となっている。特に夜間帯は限られた人数で業務を支える必要があり、改善が求められている。
間接業務の一部をテクノロジーで支援することで、医療の質を保ちながら現場負荷を軽減させることが期待されている。ヒューマノイドロボットの活用は、省力化だけでなく、医療従事者が本質的な業務に集中できる環境を整える新たな選択肢として注目される。
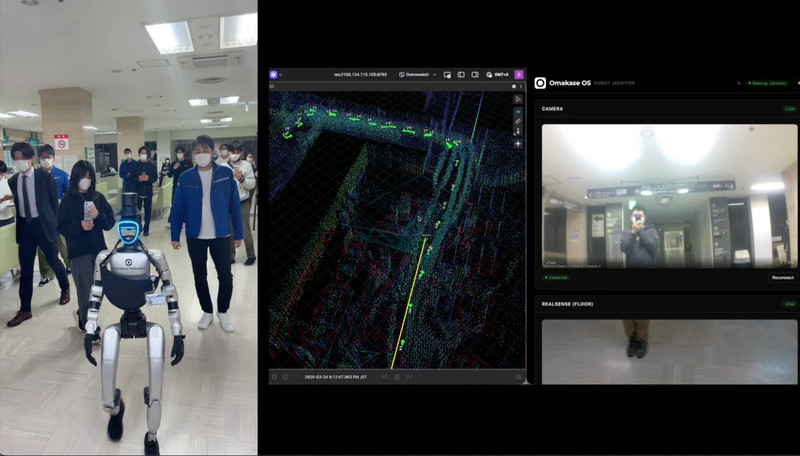
周囲の状況を理解したり人を認識したりするなど、文脈に応じて適切に振る舞えるインテリジェンスの中核となるロボティクス向けOS基盤のOmakase OSと、Quickが持つ医療現場の課題理解やベッドコントロールシステム・院内タスク管理基盤といった病院オペレーション技術を組み合わせることで、実装を見据えた検証が可能になるとしている。
実証実験の内容
実証実験は、2026年3月23日から25日までの3日間、筑波大学附属病院1階ロビーにおいて、外来診療終了後の19時から21時に実施した。Omakase OSを搭載したUnitree G1ヒューマノイドロボットを用いて、夜間病院内での自律歩行、障害物回避、案内や運搬を含む各種機能について、ロビー内の安全エリアを確認した上で検証を行った。
この実証実験は、ヒューマノイドロボットを単に歩行させるのではなく、将来的な病院導入を見据え、医療現場で求められる支援業務への適用可能性を検証する取り組みとなる。
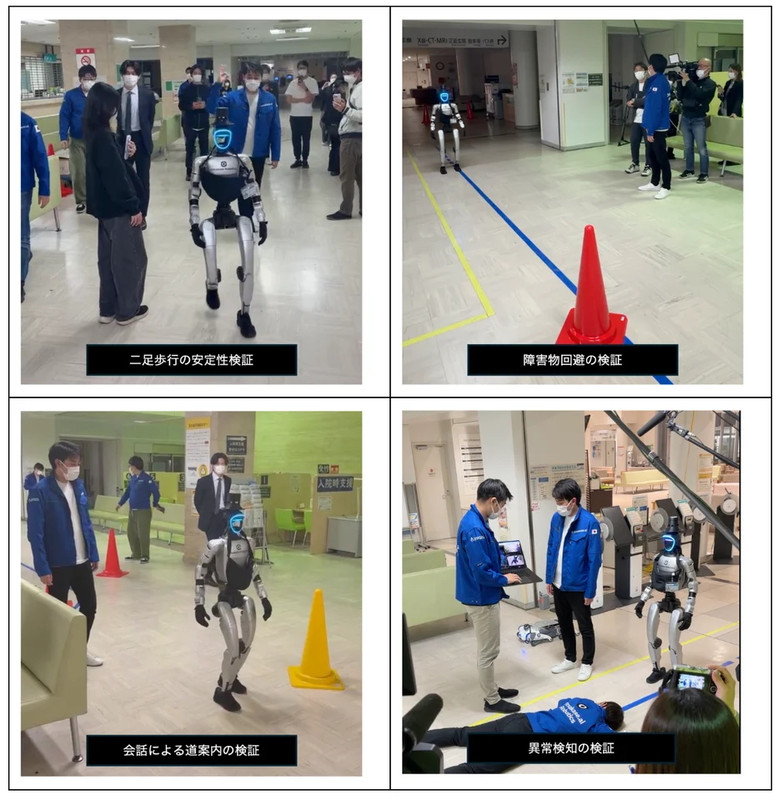
【主な検証内容】
- 病院内の床環境における歩行安定性の確認
- カラーコーンや歩行者等を対象とした障害物回避
- 「エントランスから採血室」などを想定した目的地までの自律歩行
- 物品運搬
- 会話による道案内・運搬業務の検証
- 異常検知の検証
- 関係者向けデモンストレーション
- フィードバック収集
ヒューマノイドロボットの基本動作や支援業務への適用可能性に関する複数の検証を実施し、スピーカーへの電源供給が遮断されるなどのアクシデントがあったものの、所定の検証項目を完遂。この検証を通じて、ヒューマノイドロボットが病院内の人と同じ空間で移動しながら周辺環境を認識し、支援業務の一部を担いうる可能性を確認した。
筑波大学附属病院関係者からも高い評価を得ており、同病院の平松祐司病院長は今後の導入に向けて期待を寄せている。
また、今回想定していた案内や運搬に加え、医療従事者が担うさまざまな間接業務への対応可能性についても新たなニーズが共有され、今後のユースケース拡張や開発の方向性について具体的なディスカッションを行った。
今回の実証実験は、ヒューマノイドロボットの技術的な成立性を確認するだけでなく、医療現場においてどのような役割や支援が期待されるのかを具体化し、今後の共同検討につながるものとなった。
Quickは、「進化し続ける医療インフラをつくる」をビジョンに掲げ、119番通報時のAIトリアージや消防機関との救急AI実証など、救急医療の現場にテクノロジーを導入する取り組みを進めてきた。同社は今後、ベッドコントロールシステムや院内タスク管理基盤とロボットを連携させ、効率的で安全に働ける環境の構築を目指すとしている。