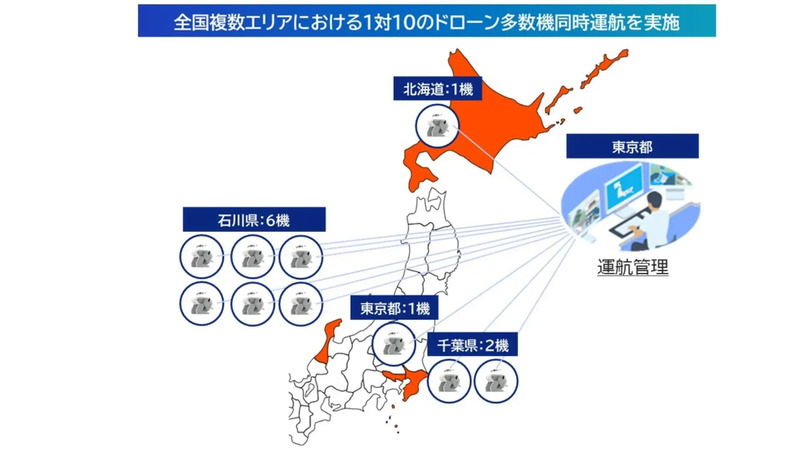
KDDIとKDDIスマートドローンは、2026年3月23日から4月27日まで、1人の遠隔操縦者が全国複数地域のドローンポートから10機のドローンを同時運航する実証を行い成功した。ドローンのカメラ映像の常時注視に依存しない運航監視体制の有効性を確認した。
この実証は、KDDIがNEDO(新エネルギー・産業技術総合開発機構)から受託した「次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)」における「複数ユースケースにおける多数機同時運航の事業化に向けた統合的な研究開発」の一環として実施したものとなる。
従来の多数機同時運航では、操縦者がドローンのカメラ映像を監視し続ける必要があり、安全を保つには最大5台程度が限界であった。
実証では、両社が北海道や千葉県、東京都、石川県の複数地域に常設しているドローンポート「Skydio Dock for X10」も活用し、東京の拠点から運航管理システム(以下、UTM)を用いて、ドローンのテレメトリー情報(機体情報、バッテリー残量、位置・高度など)を一元管理した。これにより、1人の操縦者が気象条件など運航環境の異なる複数拠点で、安全に10機のドローンを同時運航するための機体・システム・運用手順の要件を確認した。
両社はAIドローンを全国1,000拠点へ配備することで、全国どこでも10分以内にドローンが遠隔操縦で駆け付け可能となる社会基盤化を目指している。今回の実証で得た知見を活用し、ドローンの社会実装をさらに加速させる方針だ。
国内では、生産年齢人口の減少に伴う労働力不足や社会インフラの老朽化、地域の過疎化や高齢化といった社会課題の解決に向けて、ドローンの社会実装や事業化が進んでいる。
従来のドローンの運航方式では操縦者がカメラ映像を監視し続ける必要があり、管理できる機体数に限界があった。多数機同時運航を事業化するには、新たな機体やシステム、運用手順の要件を確立することが課題となっている。
実証について
今回の実証では、1人の遠隔操縦者による6機以上のドローンの同時運航実現に向け、人によるカメラ映像の常時監視を一部システムに置き換える有効性を検証した。北海道、千葉県、東京都、石川県の複数のエリアにおいて、10機同時に遠隔目視外飛行を実施した。
- 多数機同時運航を成立させる運用手順・体制要件の妥当性の確認
- 多数機同時運航に必要なシステム要件(遅延、冗長性、アラート設計など)の整理と妥当性の確認
- イレギュラーが同時多発した場合の対応可能範囲の検証
主にテレメトリー情報監視で10機の状況を把握。各機が問題なくポートへ着陸し、テレメトリー情報を主軸とした運航管理でも安全な運航が可能であることを確認した。
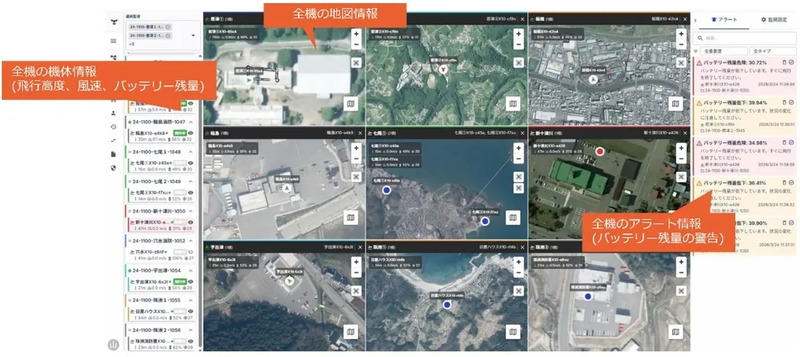
10機の同時運航中に、操縦者の介入を要する異常(バッテリー残量低下)を複数機体で同時に発生させた場合でも、操縦者がテレメトリー情報から速やかに異常を検知できることを確認。機体状況に基づいた優先順位を判断し、全機を緊急着陸させる運用手順の有効性を立証した。
視線計測による比較検証と、NASAが開発した作業における「精神的・身体的な負担」を6つの項目で評価する主観的尺度である「NASA-TLX(NASA Task Load Index)」を活用した調査により、UTMを用いたテレメトリー情報主軸の監視が、操縦者の集中力の持続や疲労軽減に有効であることがわかった。

| 事業名 | 次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)/ドローンの1対多運航を実現する機体・システムの要素技術開発/複数ユースケースにおける多数機同時運航の事業化に向けた統合的な研究開発 |
| 実施体制 | KDDI、日本航空、イームズロボティクス |
| 最終目標(2026年度) | 人間によるカメラ映像の常時監視を一部システムに置き換える多数機同時運航(6機以上)の制度設計に資する要件案の提示など |