サイバーエージェントの研究開発組織「AI Lab」と大阪大学大学院基礎工学研究科の先端知能システム(サイバーエージェント)共同研究講座は、ムーンショット型研究開発事業の一環として、2026年2月21日から3月8日の期間、1人のオペレーターが15体のアバターロボットを遠隔制御し、大規模商業施設で案内を行う実証実験を実施する。
大阪南港ATCの広大で複雑な施設環境において、アバターロボットが膨大な案内マニュアルや日々変化する施設情報を踏まえたきめ細かな案内が可能かを検証する。
少子高齢化に伴う労働力不足が深刻化するなか、多様な人々が社会参画できる環境の実現が求められている。こうした課題に対し、内閣府が主導する「ムーンショット型研究開発事業」では、人が身体・脳・空間・時間の制約から解放される社会の実現を目標に掲げており、これまでAI Labと先端知能システム(サイバーエージェント)共同研究講座では、同事業の一環として「遠隔ロボットで働く」をテーマに実証実験を継続してきた。
これまでの実証では、1人のオペレーターが5体の設置型アバターを直接操作し、生産性向上や業務効率化の可能性を検証してきた。今回は、自律制御で動作する15体のアバター群を1人のオペレーターが統合的に遠隔制御することで、接客パフォーマンスを大幅に拡張できるかを検証する。
実証概要
この実証では、実フィールドに配置した15体の自律接客アバター(設置型10体、移動型5体)の振る舞いを、1人のオペレーターが遠隔制御する仕組みを提案する。大規模言語モデルを基盤とした制御方式を採用し、実環境における実践的な施設案内サービスを提供できるかを検証する。
各アバターを大阪南港ATCの広大な敷地内に分散配置し、テナント店舗や展示イベント情報、施設設備の詳細案内や道案内など、多岐にわたる案内業務を担う。
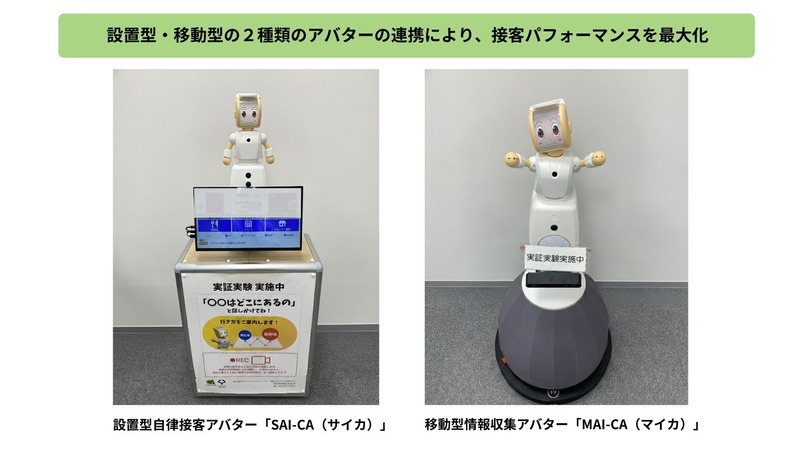
案内業務の遂行には、来訪者の質問や現場状況に応じた柔軟な案内内容の変化に加え、現場での失敗や対応履歴をもとに正しい業務知識の継続的な学習・更新が重要となる。実証では、設置型自律接客アバター「SAI-CA(サイカ)」と移動型情報収集アバター「MAI-CA(マイカ)」の2種類を活用。移動型情報収集アバターが現地を巡回して収集した最新の施設情報や状況変化を、遠隔地にいるオペレーターが即座に把握・整理することで、現地に赴くことなく詳細な最新情報を設置型自律接客アバターの案内に反映する運用を目指す。なお、実証期間のうちMAI-CAは2月23日から26日、3月2日から5日の計8日間のみ稼働する。
今後、このプロジェクトで得た知見を広く共有し、実社会におけるロボット活用の可能性を広げるとともに、社会実装を目指すとしている。