2025年12月10日、飛島建設は、自律歩行する四足歩行ロボットを利用した巡回点検システムを開発したと発表した。工事現場における施工管理業務の高度化・効率化を目的としたもので、開発機能の検証により有効性を確認した。


建設業界では、働き方改革や少子高齢化による労働力不足が進む中、生産性の向上が課題となっている。そこで飛島建設は、車輪型ロボットよりも不整地での移動に適しており、ドローンに比べてセンサー搭載の自由度も高く、稼働時間も比較的長いといった特徴を持つ四足歩行ロボットに着目。3D LiDARを用いた自己位置推定により、あらかじめ決められたポイントを自律歩行する機能と、リアルタイムの映像・音声配信、映像取得や3D点群取得などの機能を開発し、ロボットが自動自律で巡回点検するシステムを構築した。
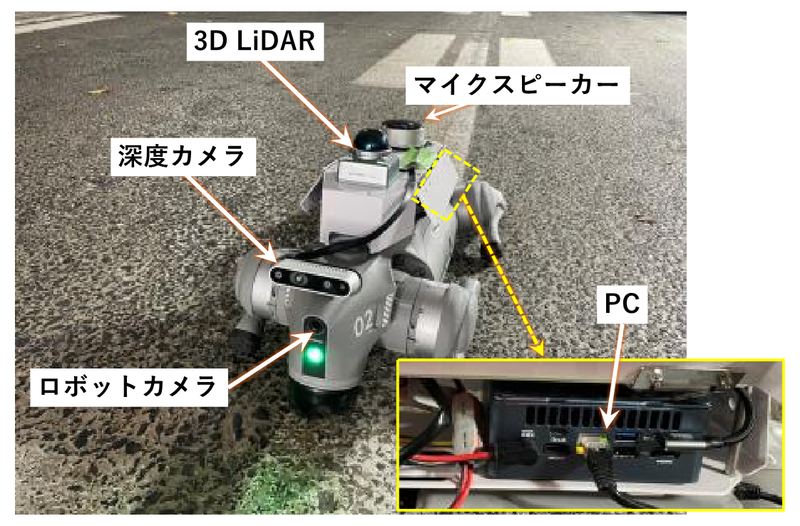
四足歩行ロボットによる巡回点検システムの概要
システムのベースとなるUnitree Robotics社製の地上型ロボット「Unitree Go2」は、専用アプリによる無線操作やROS(Robot Operation System)による制御が可能。このシステムでは、自律歩行による巡回点検に対応するため、深度カメラや3D LiDAR、マイクスピーカー、PCを搭載しており、自動的に静止画・動画・3D点群を取得する。

システムの機能
- 遠隔操作
ネットワークを介して四足歩行ロボットの操作が可能。また、ロボットのカメラ映像や深度カメラ映像、ロボットの状態(バッテリー残量、モーター温度)をリアルタイムに確認できる。Webアプリケーションとして開発しているため、デバイスによらず操作が可能。 - 双方向音声
ロボット搭載のマイクスピーカーによる遠隔地との音声コミュニケーション。 - 自律歩行
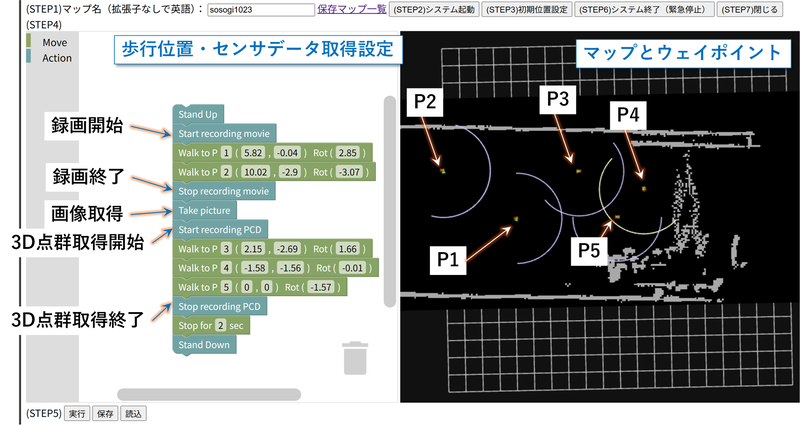
ロボット搭載の3D LiDARを用いたSLAMによる自己位置推定により、あらかじめ作成したマップ上にウェイポイントを指定することで自律歩行が可能。 - センサーデータ取得
ロボット標準搭載のカメラや3D LiDARから静止画、動画、3D点群データを取得可能。また、自律歩行設定時にデータ取得を計画することで、指定位置や指定区間で自動的にセンサーデータを取得する。
現場検証
開発機能の有効性の検証を高速道路工事内で実施。ネットワークを介した遠隔制御による四足歩行ロボットの現場(舗装路盤)歩行や映像のリアルタイム受信を行ったほか、双方向音声通信により遠隔操作者と四足歩行ロボット付近の人との遠隔音声コミュニケーションを実施した。


また、あらかじめ設定したウェイポイントを経由する自律歩行や、ウェイポイント間で障害物が存在する場合の迂回歩行、事前に設定した位置・区間でのセンサーデータの取得についても実証を行った。
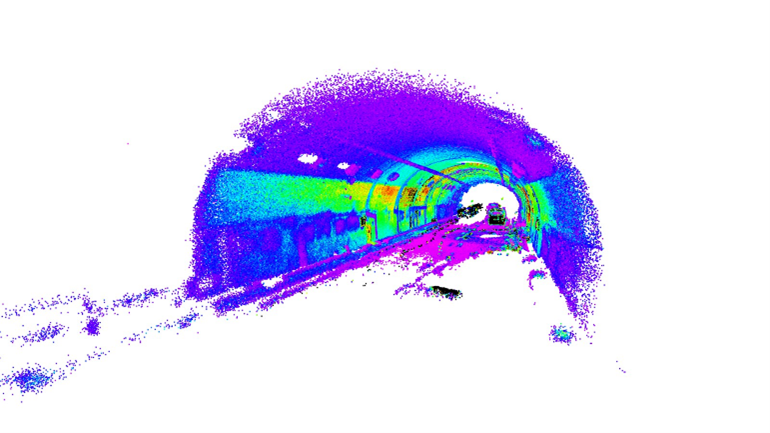
さらに、自律歩行で取得した3D点群データと、別途測定した3Dスキャナーによる点群データを坑口から約20mの断面で比較したところ、トンネル幅について20mm程度の差で測定可能であることを実証した。
今後、飛島建設は、四足歩行ロボットによる自動巡回点検の現場実装を推進するとともに、ドローンによる遠隔点検システムと組み合わせることで、屋外はドローン、屋内は四足歩行ロボットを活用するといった補完・協調システムの開発に取り組む方針だ。