竹中工務店、NTTドコモビジネス、アスラテックは、空間IDを活用した建設現場のロボット運用システム「ロボットナビゲーションシステム」を開発したことを発表した。
このシステムは、NTTドコモビジネスが展開する建設現場の作業間調整を支援するサービス「tateras(タテラス)作業間調整」と、空間IDの3次元位置情報を組み合わせることで、建設現場内でのロボットの自律移動を可能にする。巡回ロボットなどの高精度なルート設定により、ロボット運用にかかる手間とコストを削減し、労働力不足の解消や生産性の向上に貢献する。
空間IDとは、経済産業省などが策定を進めているデータ規格のことで、3次元空間を立方体(ボクセル)に分割し、各ボクセルに固有のIDを割り当てることで、地球上のあらゆる位置を特定できる。
なお、この成果は、新エネルギー・産業技術総合開発機構(NEDO)の委託業務の結果、得られたものとなる。
3社は、2027年の実用化を目指すとしている。

建設業界では、労働力不足の解消や安全性・生産性の向上のため、ロボットの開発が進められている。建設現場でのロボット運用には、屋内・屋外間や3次元方向の移動が困難、自律移動に必要なマップの整備にコストがかかるなどの課題があった。3社は2022年から、空間IDを活用したロボット運用システムの開発に着手し、四足歩行ロボット「Spot(スポット)」などを用いて、建設現場を巡回させる実証実験を行ってきた。
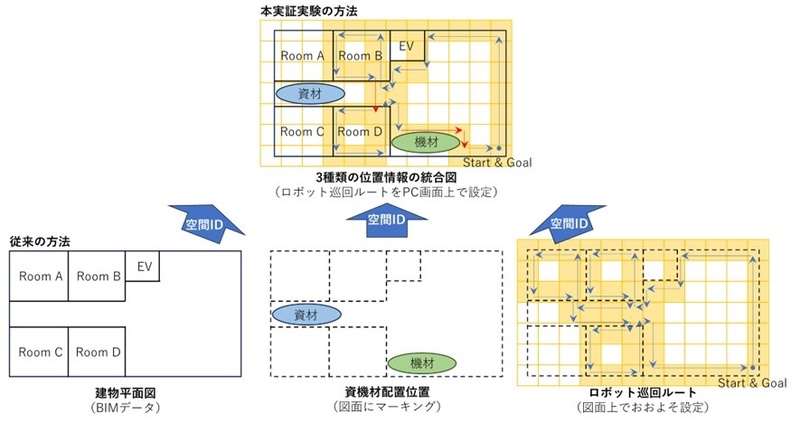
今回開発したシステムは、tateras作業間調整に入力される建設現場の図面と施工管理情報(日々の作業箇所、重機の位置、資機材の搬出入など)をもとにマップを構築し、空間IDを活用してロボットの移動ルートを設定する。
tateras作業間調整は、施工管理情報に対して開始・終了時刻と実スケール(mm単位)を付与することが可能。そのため、ロボットの走行計画の作成時に走行可能なスペースが確保できるかを、時々刻々と変化する施工状況と照らし合わせながら柔軟に計画できる。これにより、日々の工程に応じて変化する立入禁止区域や養生エリアなど、ロボットの点群マップだけでは走行可否判断が難しい建設現場でも、高精度なルート計画や自律移動を実現する。
ロボットの移動については、空間IDを用いることで、屋内外や上下階の移動が生じる複雑な建設現場でも、各エリアで生成されたマップを統合し、シームレスな自律移動が可能。さらに、空間IDをシステム間連携の共通言語として活用することで、異なる種類のロボットや複数台のロボットの同時運用を実現する。
竹中工務店の建設現場で実施した実証実験では、同システムを用いたロボットの巡回作業により、現場職員の確認作業の負担を軽減し、業務時間を約30%削減した。また、空間IDをシステム間の共通言語として活用することで、ロボットのシステム開発コストを約30%削減できる。
【各社の役割】
| 竹中工務店 | 建設現場のナレッジ提供、システム全体企画、実証現場の提供、実証実験効果検証および考察 |
| NTTドコモビジネス | 本システムと「tateras作業間調整」の連携機能の開発、建設現場向けに3次元情報と時間を組み合わせた4次元時空間情報(※1)基盤の提供、実証実験の実施、効果検証および考察 |
| アスラテック | 本システム開発、Spot向けカスタマイズ機能の開発、実証実験の実施 |
※1 3次元情報である空間IDに時間の情報をひもづけ、時間経過で変化する3次元情報を表現することができる情報。