2025年6月4日、Intent Exchangeは、2025年2月に静岡県御殿場市において、有人機との衝突を回避するために有用なドローン運航管理(UTM)の実証を行ったと発表した。
ヘリコプター等が場外離着陸場に離着陸する際には、同じく低高度を飛行するドローンとの衝突が懸念されている。この実証では、一時的なジオフェンス(飛行不可とされたエリア)や、ドローンのリアルタイムな位置情報の把握、侵入検知などを行うことで、有人機との衝突回避に有用であることを実証した。Intent Exchangeは、実証の成果を踏まえ、空飛ぶクルマも含めたエアモビリティの安全かつ効率的な運航管理の社会実装を進めるとしている。
この実証は、新エネルギー・産業技術総合開発機構(NEDO)が推進する「次世代空モビリティの社会実装に向けた実現プロジェクト(ReAMoプロジェクト)」の取り組みの一環として実施したもの。また、実証の成果は、「無人航空機の運航管理(UTM)に関する制度整備の方針」に記載されるUTMサービスプロバイダ(USP)として必要と考えられる機能(リアルタイムでの位置情報共有や逸脱検知など)の検証に用いられる予定だ。
ドローンや空飛ぶクルマが利用する低高度空域は既存航空機も飛行するため、ReAMoプロジェクトでは有人機との連携を行うUTMの研究開発を行っている。制度面では、航空局のドローン情報基盤システム(DIPS2.0)を中心とする現在の運航管理に、認定USPを取り込む制度整備方針が示されている。DIPS2.0では、主に静的な情報である飛行計画などを管理するのに対し、民間の認定USPでは、機体のリアルタイムな位置情報などの動的かつ詳細な情報を管理する。現在、世界各国で認定制度化が進んでおり、日本では一部の機能に関する認定が2025年度に予定されている。
実証について
従来、ヘリコプター等の有人機が離着陸する際には、低高度を飛行するドローンとの衝突リスクがある。特に、空港等以外の場外離着陸場では安全確保のための対策が求められる。
今回、場外離着陸場での有人機とドローンの衝突回避シナリオを設定し、その実現に必要な機能の技術的な検証を目的に、実証実験を実施。また、運航者視点での運用の容易性について、そのシナリオを机上検証した。
【実証概要】
| 日時 | 2025年2月27日 |
| 場所 | 御殿場市NECモビリティテストセンター(場外離着陸場) |
| 実施者 | Intent Exchange、日本電気(NEC) |
【検証内容】
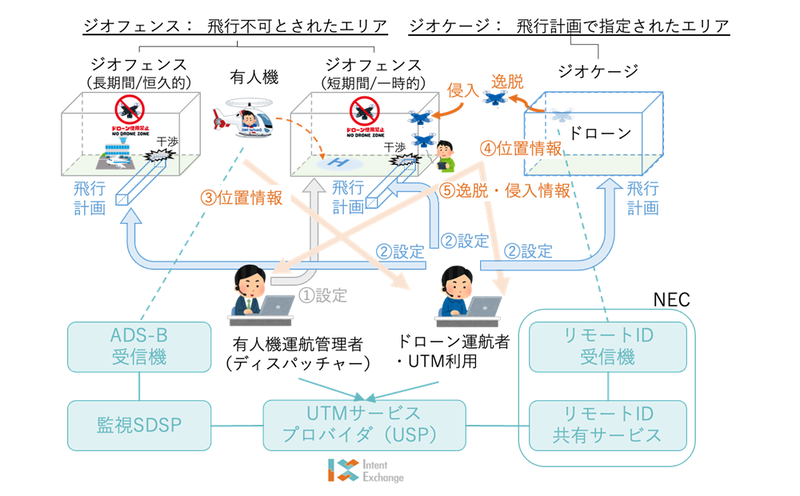
シナリオとして、ドクターヘリの運航管理者(ディスパッチャー)が、救命救急のために場外離着陸場に離着陸する際に、USPのジオフェンス設定サービスを用いて、周辺に一時的なジオフェンスを設定する想定をした。
- 有人機運航管理者による一時的なジオフェンスの設定
一時的なジオフェンス設定の機能検証を実施。ドローンとの計画調整を行うため、経路全体の飛行計画を共有する方式に対して、本方式の方が飛行中の飛行経路の変更が容易である点なども検証で確認した。 - ドローンの飛行計画とジオフェンスとの干渉確認
USPを用いるドローン運航者が飛行計画を設定する際に、ジオフェンスと干渉した計画は設定できないことを検証した。ジオフェンスとしては、短期間で一時的なジオフェンス(ASTM標準)と、空港周辺などの長期間・恒久的なジオフェンス(EUROCAE標準)とを同様に扱えることを確認した。設定された飛行計画は、ドローンがその内部で運航されるように管理されるジオフェンスとして扱われる。 - リモートIDによるドローンのリアルタイム位置情報表示
USPを用いるドローン運航者や有人機運航管理者に対して、場外離着陸場周辺のドローンの位置情報が提供できることを実証した。対象のドローンは、リモートIDを搭載した機体であり、NECが実証したリモートID共有サービスを用いて得た情報となる。このサービスは、場外離着陸場周辺の受信機で得た情報を他のUSPに提供する。 - 有人機のリアルタイム位置情報提供
USPを用いるドローン運航者に対して、周囲を飛行する有人機の位置情報を提供する。この情報は、既存航空機や空飛ぶクルマに搭載されるADS-B(Automatic Dependent Surveillance – Broadcast、放送型自動従属監視)の信号を低高度用受信機によって受信し、監視SDSP(Supplemental Data Service Provider)を介して提供する。 - ドローンの逸脱・侵入の通知
USPは、各運航のジオケージからの逸脱と、ジオフェンスへの侵入を検知する。検知した情報は、ドローン運航者や有人機運航管理者などに画面やメール等で通知する。実証では、UTMに接続していないドローンが、場外離着陸場の周辺に侵入したことを検知する検証を行った。
同社は今後、国際標準に基づく技術体系で構築されたシステムの検証を行うとともに、認定USPの制度設計の観点から、その要件検討の材料となる運用検証を開始する。また、ドローンと空飛ぶクルマ、既存航空機による初期の空域共有に向けた統合的な運航管理システムのアーキテクチャ検討(とりまとめ:宇宙航空研究開発機構(JAXA))で得られた知見を反映するとしている。