2025年7月17日、東洋エンジニアリング(以下、TOYO)、日鉄エンジニアリング(以下、NSE)、FullDepth、沖電気工業(以下、OKI)は、内閣府「自律型無人探査機(AUV)利用実証事業/洋上風力発電施設の維持管理モデルの構築」に提案した「自律型海洋無人機・無人潜水機を用いた利用実証事業」が採択されたことを発表した。
この実証事業では、自律型の海洋無人機(ASV)と、遠隔操作型の無人潜水機(ROV)の海上での実証試験を通じて、洋上風力発電設備の維持・管理における水中点検作業の自律・無人化を検討し、自律型無人探査機(AUV)等の海洋ロボティクスの社会実装に向けたロードマップ作成を行う。
| ASV | Autonomous Surface Vehicle。自律制御により水上を航行する無人機。今回の実証試験ではFullDepthのパートナー企業であるエイトノットが保有する「Eight Knot Ⅰ」を使用予定。 |
| ROV | Remotely Operated Vehicle。遠隔操作により水中を潜行する無人潜水機。今回の実証試験では、FullDepth「DiveUnit300」を使用予定。 |
| AUV | 機器自身が水中の位置や周囲の状況を認識し、自律して動く無人潜水機。 |
洋上風力発電施設の維持管理には、海上や水中での作業があることから、作業安全性やダイバーの不足、点検保守のコストといった課題がある。そのため、水中を自律航行することで海中データの収集、設備の点検などを行うことができるAUV等の活用が期待されている。
実証事業の内容
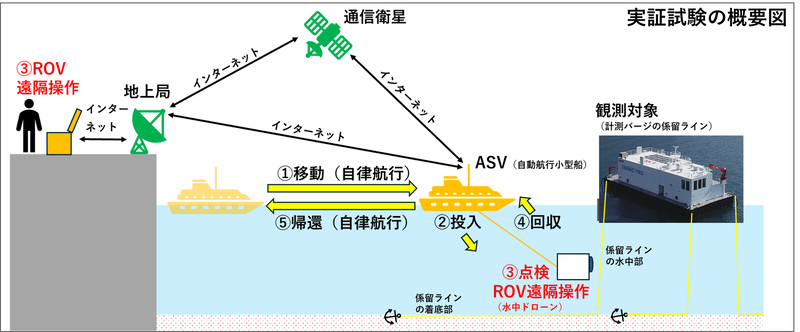
AUVの社会実装に向けた最初の段階として、ASVとROVを用いて将来のAUV化を想定した実証試験を海上で行う。浮体式洋上風力発電設備に見立てた観測対象(OKIが所有する計測バージ「SEATEC NEO」係留ライン)の水中データを無人で取得する技術の有効性を確認する。
この結果をもとに、AUV等の活用に向けた技術的課題の抽出・整理を実施し、データ駆動(DX)型の洋上風力維持管理モデルや収益モデルの検討を行う。最終的には、AUV等の社会実装のためのロードマップを作成する。
多岐にわたる領域でプロジェクトを遂行してきたTOYOが事業全体を取りまとめ、洋上風力発電設備の設計・製作・施工の実績を有するNSE、海洋無人機(ASV・ROV)を用いた点検技術を有するFullDepth、AUV等の社会実装に向けたインフラ技術に知見を持つOKIと共同実施体制を構築し、実証試験とAUV社会実装ロードマップの作成に取り組む。