2024年3月7日、セイコーエプソン(以下、エプソン)は、高性能な6軸センサーを搭載した慣性計測ユニット(IMU)(※1)の新ラインアップとして、低ノイズのプレミアムモデル「M-G370PDT」(以下、M-G370T)を開発、2024年2月より量産を開始したことを発表した。
※1 慣性計測ユニット:3軸の角速度(ジャイロ)センサーと3軸の加速度センサーからなる慣性運動量を検出する装置。

同社のIMUは、精密農業(GNSS)や民生・産業部品を活用する小型人工衛星、EO/IRカメラジンバル(電気光学式、赤外線式カメラシステム)、アンテナの制振制御など、さまざまなアプリケーションに採用されている。近年では、空中や人工衛星での映像撮影や測量など活用分野が広がり、より正確な位置・姿勢制御のニーズが増大。それに伴いIMUには姿勢制御において重要とされる精度、特にノイズ性能への要求が高まっている。
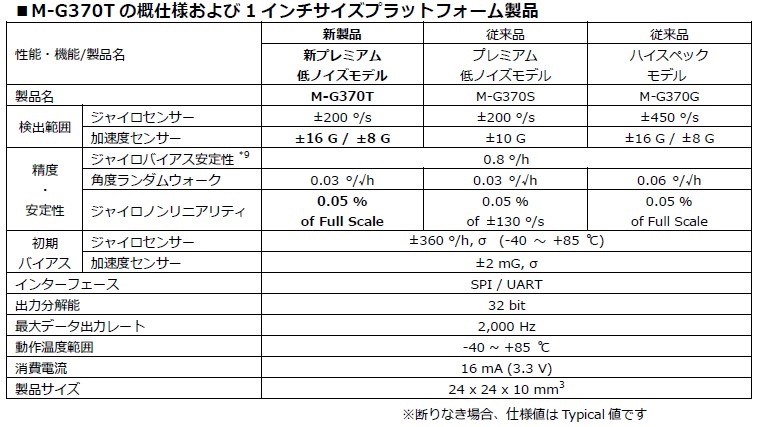
M-G370Tは1インチサイズかつ、従来製品2機種それぞれの特徴を備えることで、低ノイズ、高精度計測を実現した。
従来の「M-G370PDS」(以下、M-G370S)で実現したIMUの重要性能である短期安定度を示す角度ランダムウォーク(※2)0.03°/√h を維持しているため耐ノイズ性が高く、機器やシステムに発生するわずかな姿勢変化をより正確に検知。
「M-G370PDG」(以下、M-G370G)は、加速度センサーの検出範囲±8G/16Gをユーザーが切り替え可能。また、ジャイロセンサー(※3)のすべての検出範囲においてノンリニアリティ(※4)特性0.05%を備える。これにより、ゆっくりした動作から速い動作まで、さまざまな動作を高精度に計測することが可能となった。
※2 角度ランダムウォーク:アラン分散(※)の-1/2乗の傾きがある部分を角度ランダムウォークと呼ぶ。ホワイトノイズと相関があるため、平均時間を長くすると平均時間の-1/2乗で値は小さくなる。
※ アラン分散:センサーの性能を表す指標の一つで、静止時出力の安定性を表す。横軸にデータの平均時間、縦軸に平均時間で区切ったときの平均値の分散を示している。アラン分散に現れる特性の傾きは-1、-1/2、0、1/2、1乗の傾きになることが知られており、アラン分散はノイズ密度と相関性があり、ノイズ密度は周波数、アラン分散は時間で表現される指標である。値が小さいほど、安定度が高く、性能が良いことを示す。
※3 ジャイロ(角速度)センサー:基準軸に対する、物体の単位時間当たりの回転角度(角速度)を検出するセンサー。
※4 ノンリニアリティ:ジャイロセンサーあるいは加速度センサーの入出力特性において、線形近似したときの近似直線と出力値のずれ幅(誤差)の最大値をフルスケールとの比で表したもの。
「M-G370PDT」の特徴
・ 1インチサイズプラットフォーム(24×24×10mm³)
・ 従来製品(M-G370S/370G)と互換性を維持し、開発コスト・評価期間を大幅に削減
・ 角度ランダムウォーク 0.03°/√h
・ 加速度センサーの検出範囲 ±8G/16Gをユーザーが切り替え可能
・ ジャイロセンサーのノンリニアリティ特性0.05%
・ 低消費電流 16mA
「M-G370PDT」のアプリケーション
・ 民生・産業部品を活用する小型人工衛星・EO/IRカメラジンバル・アンテナなどの制振制御
・ 無人機(産業ドローン・地上車・海底探査)など
・ 産業機器などの振動・角度・軌道計測
・ ナビゲーションシステム(GNSS、INS(慣性航法装置)、高精度ロケータ)など